 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDex-Net 3.0: Computing Robust Robot Vacuum Suction Grasp Targets in Point Clouds using a New Analytic Model and Deep Learning
Paper and Code
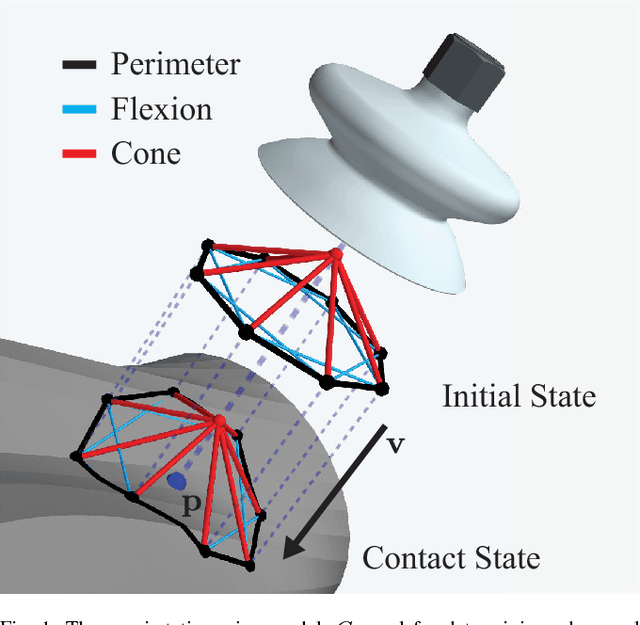
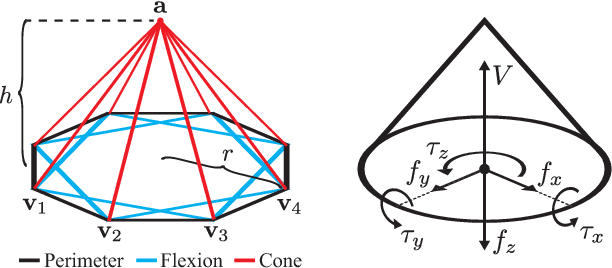
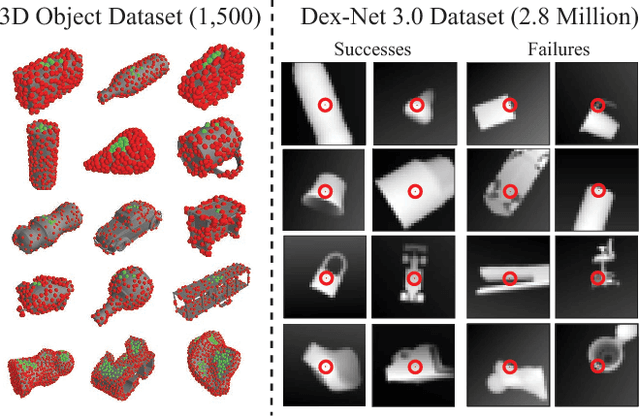

Vacuum-based end effectors are widely used in industry and are often preferred over parallel-jaw and multifinger grippers due to their ability to lift objects with a single point of contact. Suction grasp planners often target planar surfaces on point clouds near the estimated centroid of an object. In this paper, we propose a compliant suction contact model that computes the quality of the seal between the suction cup and local target surface and a measure of the ability of the suction grasp to resist an external gravity wrench. To characterize grasps, we estimate robustness to perturbations in end-effector and object pose, material properties, and external wrenches. We analyze grasps across 1,500 3D object models to generate Dex-Net 3.0, a dataset of 2.8 million point clouds, suction grasps, and grasp robustness labels. We use Dex-Net 3.0 to train a Grasp Quality Convolutional Neural Network (GQ-CNN) to classify robust suction targets in point clouds containing a single object. We evaluate the resulting system in 350 physical trials on an ABB YuMi fitted with a pneumatic suction gripper. When evaluated on novel objects that we categorize as Basic (prismatic or cylindrical), Typical (more complex geometry), and Adversarial (with few available suction-grasp points) Dex-Net 3.0 achieves success rates of 98$\%$, 82$\%$, and 58$\%$ respectively, improving to 81$\%$ in the latter case when the training set includes only adversarial objects. Code, datasets, and supplemental material can be found at http://berkeleyautomation.github.io/dex-net .