 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Condition- and Environment-Invariant Place Recognition with Semantic Place Categorization
Paper and Code
Jun 22, 2017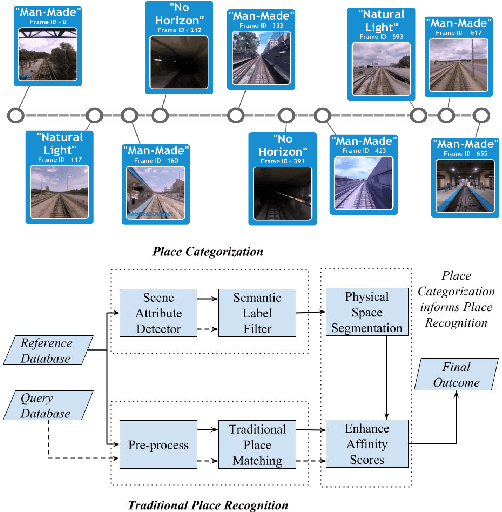
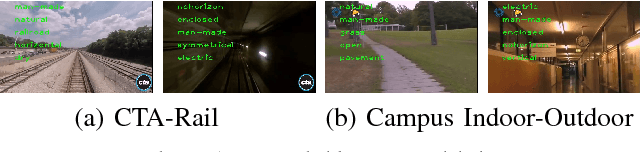
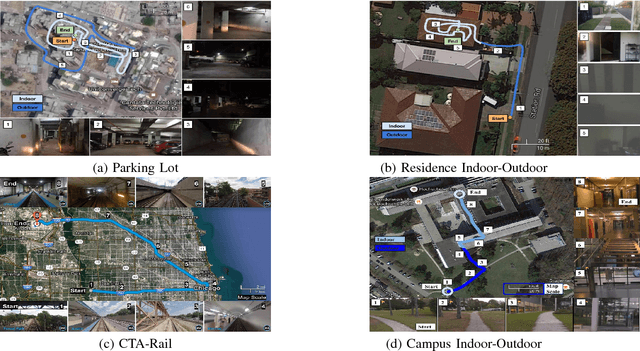
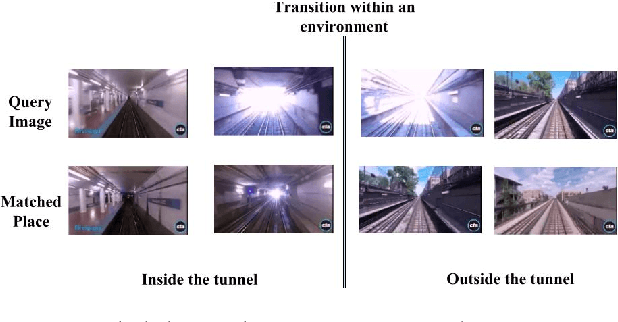
The place recognition problem comprises two distinct subproblems; recognizing a specific location in the world ("specific" or "ordinary" place recognition) and recognizing the type of place (place categorization). Both are important competencies for mobile robots and have each received significant attention in the robotics and computer vision community, but usually as separate areas of investigation. In this paper, we leverage the powerful complementary nature of place recognition and place categorization processes to create a new hybrid place recognition system that uses place context to inform place recognition. We show that semantic place categorization creates an informative natural segmenting of physical space that in turn enables significantly better place recognition performance in comparison to existing techniques. In particular, this new semantically informed approach adds robustness to significant local changes within the environment, such as transitioning between indoor and outdoor environments or between dark and light rooms in a house, complementing the capabilities of current condition-invariant techniques that are robust to globally consistent change (such as day to night cycles). We perform experiments using 4 benchmark and new datasets and show that semantically-informed place recognition outperforms the previous state-of-the-art systems. Like it does for object recognition [1], we believe that semantics can play a key role in boosting conventional place recognition and navigation performance for robotic systems.