 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Deep Energy-Based Policies
Paper and Code
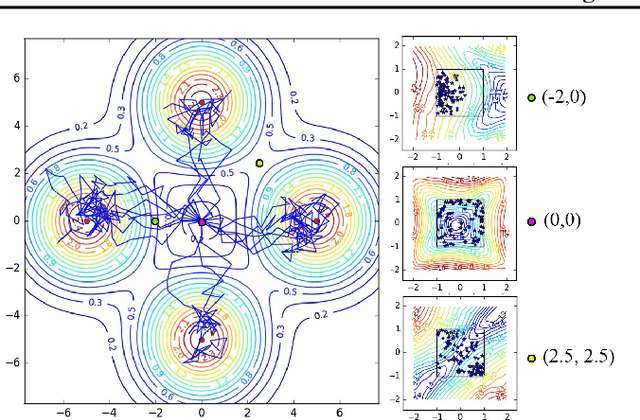
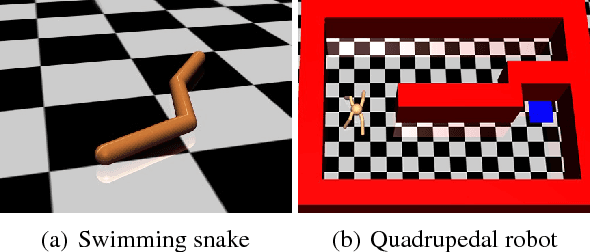
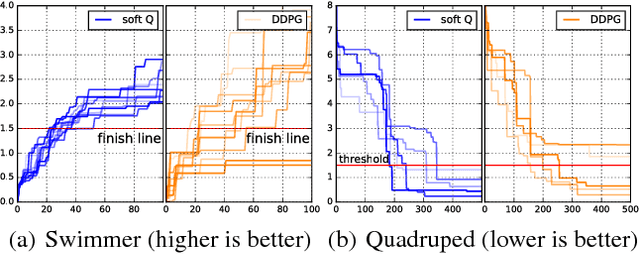
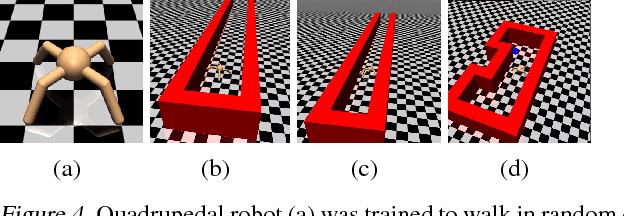
We propose a method for learning expressive energy-based policies for continuous states and actions, which has been feasible only in tabular domains before. We apply our method to learning maximum entropy policies, resulting into a new algorithm, called soft Q-learning, that expresses the optimal policy via a Boltzmann distribution. We use the recently proposed amortized Stein variational gradient descent to learn a stochastic sampling network that approximates samples from this distribution. The benefits of the proposed algorithm include improved exploration and compositionality that allows transferring skills between tasks, which we confirm in simulated experiments with swimming and walking robots. We also draw a connection to actor-critic methods, which can be viewed performing approximate inference on the corresponding energy-based model.