 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Model-Predictive Motion Planner for the IARA Autonomous Car
Paper and Code
Nov 09, 2017
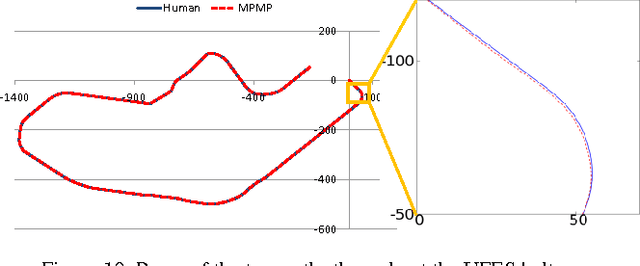

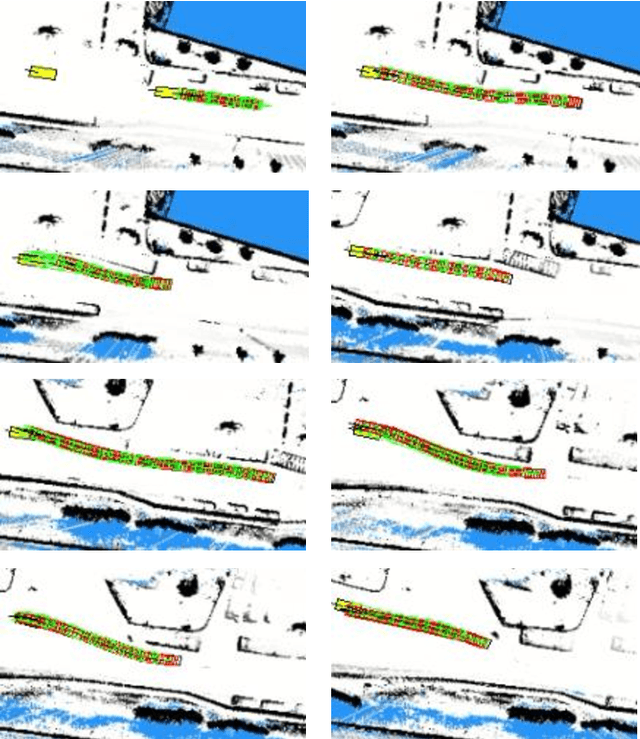
We present the Model-Predictive Motion Planner (MPMP) of the Intelligent Autonomous Robotic Automobile (IARA). IARA is a fully autonomous car that uses a path planner to compute a path from its current position to the desired destination. Using this path, the current position, a goal in the path and a map, IARA's MPMP is able to compute smooth trajectories from its current position to the goal in less than 50 ms. MPMP computes the poses of these trajectories so that they follow the path closely and, at the same time, are at a safe distance of eventual obstacles. Our experiments have shown that MPMP is able to compute trajectories that precisely follow a path produced by a Human driver (distance of 0.15 m in average) while smoothly driving IARA at speeds of up to 32.4 km/h (9 m/s).