 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Static Center of Pressure Sensitivity: a further Criterion to assess Contact Stability and Balancing Controllers
Paper and Code
May 29, 2017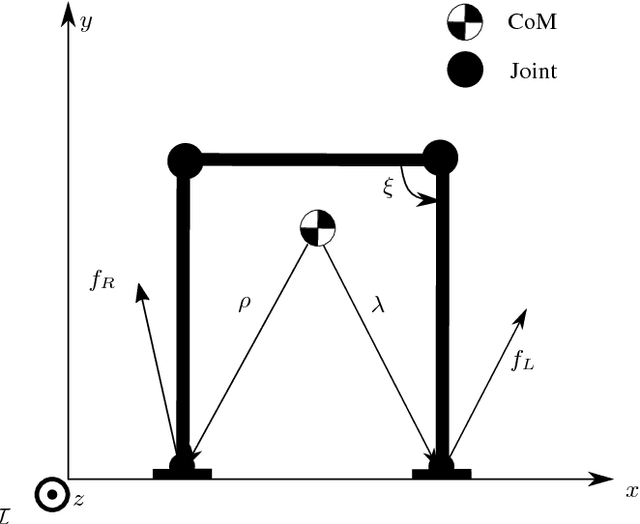
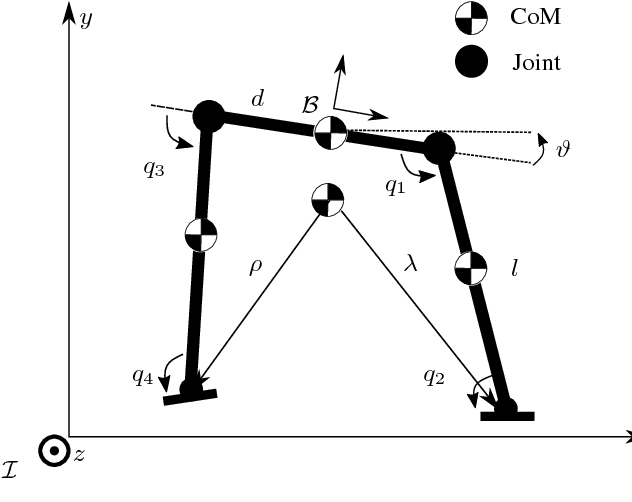
Legged locomotion has received increasing attention from the robotics community. In this respect, contact stability plays a critical role in ensuring that robots maintain balance, and it is a key element for balancing and walking controllers. The Center of Pressure is a contact stability criterion that defines a point that must be kept strictly inside the support polygon in order to ensure postural stability. In this paper, we introduce the concept of the sensitivity of the static center of pressure: roughly speaking, the rate of change of the center of pressure with respect to the system equilibrium configurations. This new concept can be used as an additional criterion to assess the robustness of the contact stability. We show how the sensitivity of the center of pressure can also be used as a metric to assess balancing controllers by considering two state-of-the-art control strategies. The analytical analysis is performed on a simplified model, and validated during balancing tasks on the iCub humanoid robot.