 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distributed Model Predictive Control Framework for Road-Following Formation Control of Car-like Vehicles (Extended Version)
Paper and Code
Apr 29, 2016
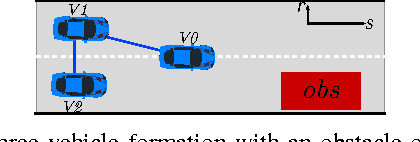
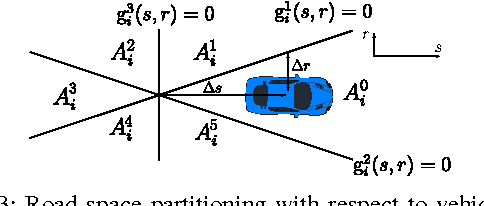

This work presents a novel framework for the formation control of multiple autonomous ground vehicles in an on-road environment. Unique challenges of this problem lie in 1) the design of collision avoidance strategies with obstacles and with other vehicles in a highly structured environment, 2) dynamic reconfiguration of the formation to handle different task specifications. In this paper, we design a local MPC-based tracking controller for each individual vehicle to follow a reference trajectory while satisfying various constraints (kinematics and dynamics, collision avoidance, \textit{etc.}). The reference trajectory of a vehicle is computed from its leader's trajectory, based on a pre-defined formation tree. We use logic rules to organize the collision avoidance behaviors of member vehicles. Moreover, we propose a methodology to safely reconfigure the formation on-the-fly. The proposed framework has been validated using high-fidelity simulations.