 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Parameter Identification Including Friction and Motor Dynamics
Paper and Code
Oct 16, 2014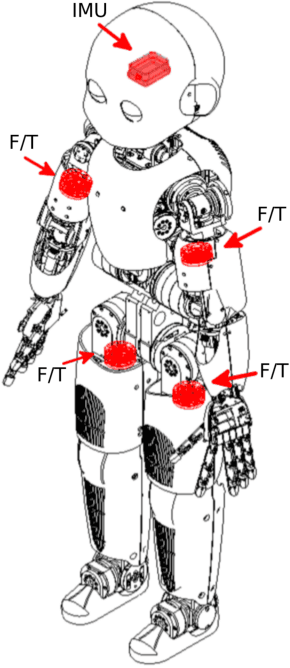
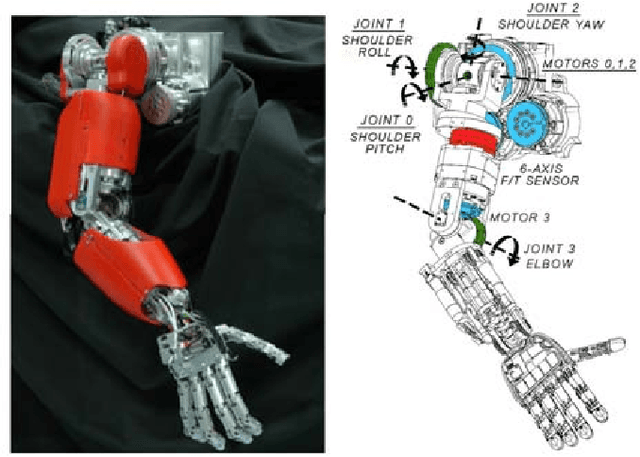
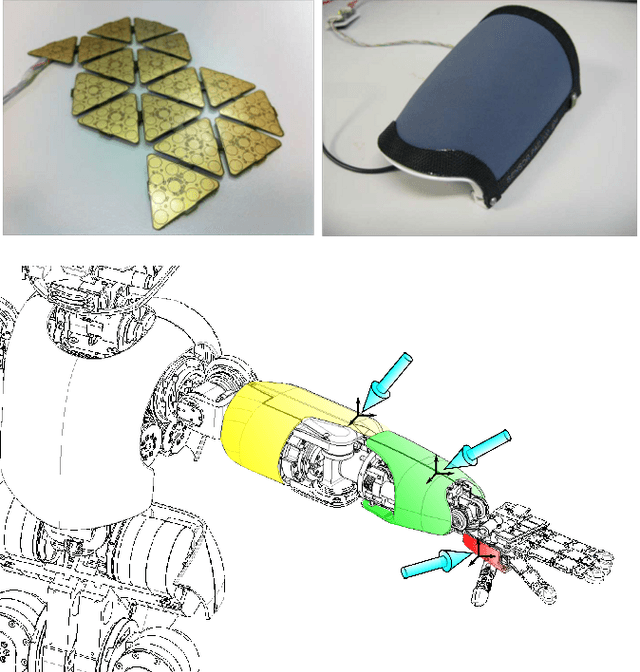
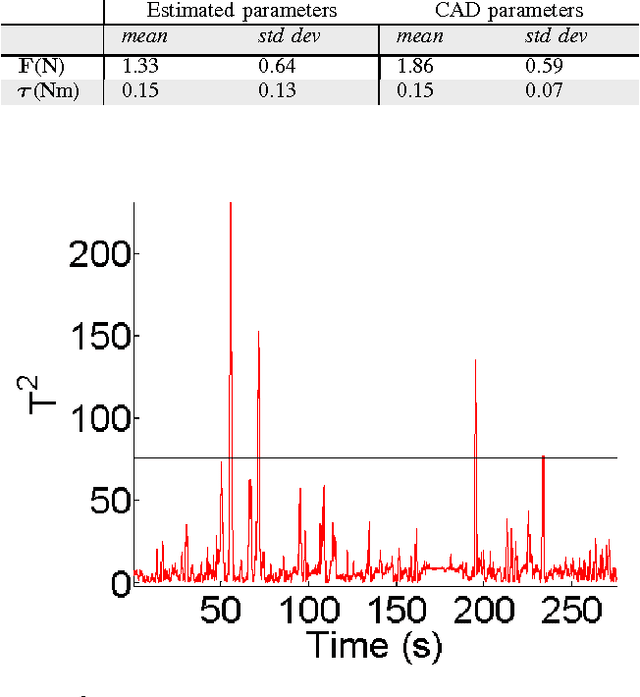
Identification of inertial parameters is fundamental for the implementation of torque-based control in humanoids. At the same time, good models of friction and actuator dynamics are critical for the low-level control of joint torques. We propose a novel method to identify inertial, friction and motor parameters in a single procedure. The identification exploits the measurements of the PWM of the DC motors and a 6-axis force/torque sensor mounted inside the kinematic chain. The partial least-square (PLS) method is used to perform the regression. We identified the inertial, friction and motor parameters of the right arm of the iCub humanoid robot. We verified that the identified model can accurately predict the force/torque sensor measurements and the motor voltages. Moreover, we compared the identified parameters against the CAD parameters, in the prediction of the force/torque sensor measurements. Finally, we showed that the estimated model can effectively detect external contacts, comparing it against a tactile-based contact detection. The presented approach offers some advantages with respect to other state-of-the-art methods, because of its completeness (i.e. it identifies inertial, friction and motor parameters) and simplicity (only one data collection, with no particular requirements).