 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Path Online Planning for Urban Scene Updation
Paper and Code
May 02, 2025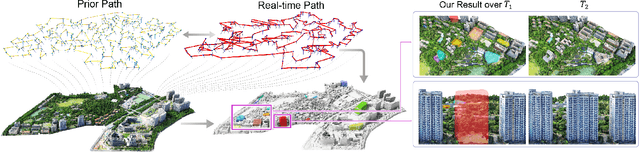

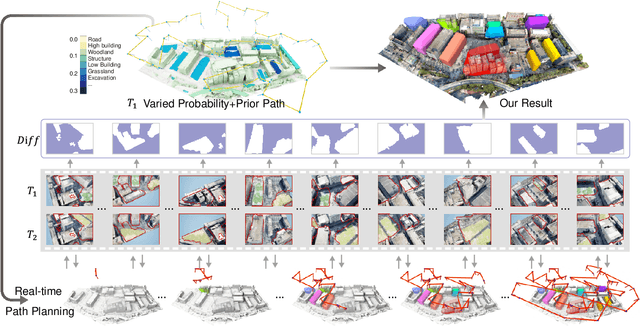
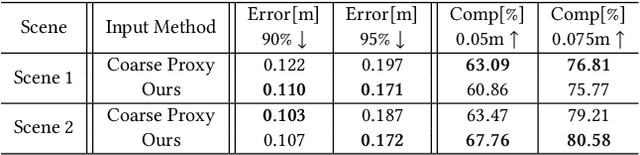
We present the first scene-update aerial path planning algorithm specifically designed for detecting and updating change areas in urban environments. While existing methods for large-scale 3D urban scene reconstruction focus on achieving high accuracy and completeness, they are inefficient for scenarios requiring periodic updates, as they often re-explore and reconstruct entire scenes, wasting significant time and resources on unchanged areas. To address this limitation, our method leverages prior reconstructions and change probability statistics to guide UAVs in detecting and focusing on areas likely to have changed. Our approach introduces a novel changeability heuristic to evaluate the likelihood of changes, driving the planning of two flight paths: a prior path informed by static priors and a dynamic real-time path that adapts to newly detected changes. The framework integrates surface sampling and candidate view generation strategies, ensuring efficient coverage of change areas with minimal redundancy. Extensive experiments on real-world urban datasets demonstrate that our method significantly reduces flight time and computational overhead, while maintaining high-quality updates comparable to full-scene re-exploration and reconstruction. These contributions pave the way for efficient, scalable, and adaptive UAV-based scene updates in complex urban environments.