 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoBus: A Multimodal Dataset for Controllable Road Networks and Building Layouts Generation
Jul 10, 2024Automated 3D city generation, focusing on road networks and building layouts, is in high demand for applications in urban design, multimedia games and autonomous driving simulations. The surge of generative AI facilitates designing city layouts based on deep learning models. However, the lack of high-quality datasets and benchmarks hinders the progress of these data-driven methods in generating road networks and building layouts. Furthermore, few studies consider urban characteristics, which generally take graphics as analysis objects and are crucial for practical applications, to control the generative process. To alleviate these problems, we introduce a multimodal dataset with accompanying evaluation metrics for controllable generation of Road networks and Building layouts (RoBus), which is the first and largest open-source dataset in city generation so far. RoBus dataset is formatted as images, graphics and texts, with $72,400$ paired samples that cover around $80,000km^2$ globally. We analyze the RoBus dataset statistically and validate the effectiveness against existing road networks and building layouts generation methods. Additionally, we design new baselines that incorporate urban characteristics, such as road orientation and building density, in the process of generating road networks and building layouts using the RoBus dataset, enhancing the practicality of automated urban design. The RoBus dataset and related codes are published at https://github.com/tourlics/RoBus_Dataset.
Semantic Neighborhood-Aware Deep Facial Expression Recognition
Apr 27, 2020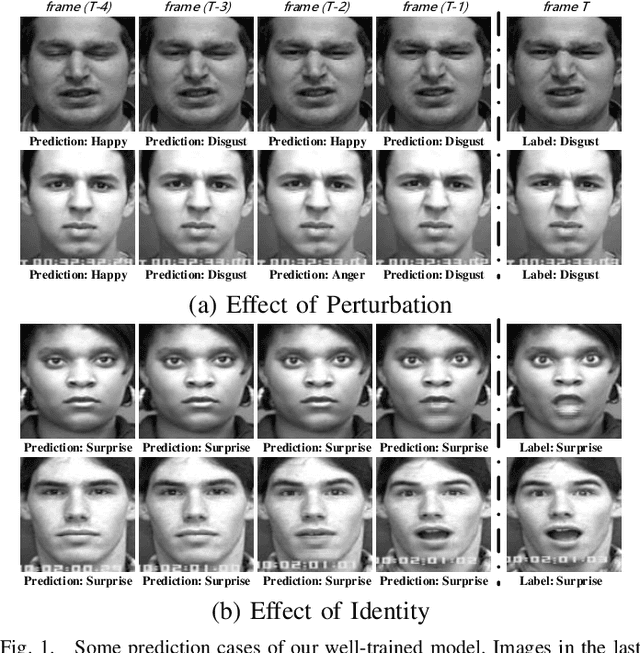
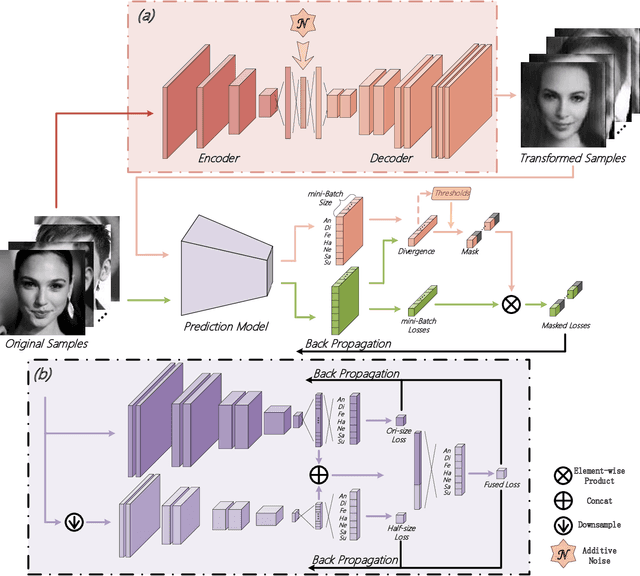
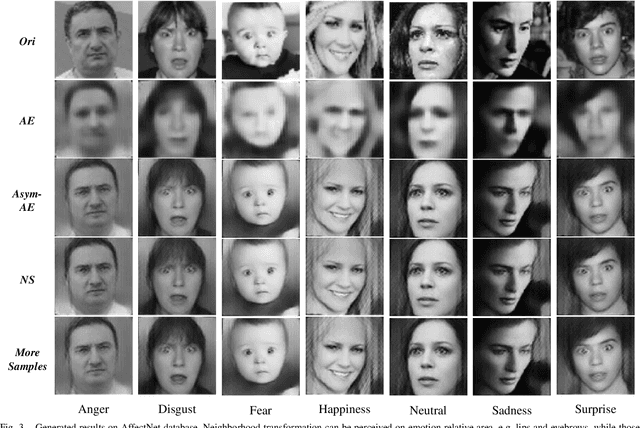
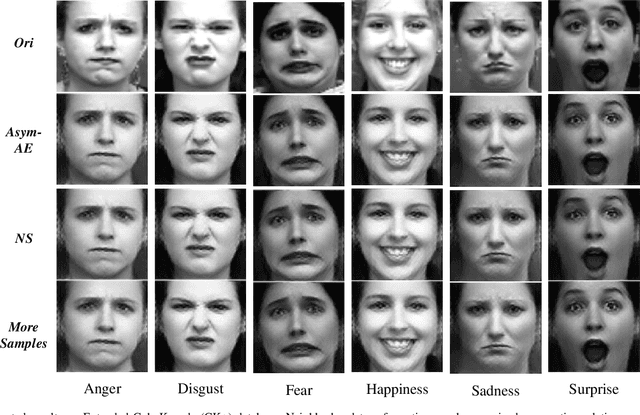
Different from many other attributes, facial expression can change in a continuous way, and therefore, a slight semantic change of input should also lead to the output fluctuation limited in a small scale. This consistency is important. However, current Facial Expression Recognition (FER) datasets may have the extreme imbalance problem, as well as the lack of data and the excessive amounts of noise, hindering this consistency and leading to a performance decreasing when testing. In this paper, we not only consider the prediction accuracy on sample points, but also take the neighborhood smoothness of them into consideration, focusing on the stability of the output with respect to slight semantic perturbations of the input. A novel method is proposed to formulate semantic perturbation and select unreliable samples during training, reducing the bad effect of them. Experiments show the effectiveness of the proposed method and state-of-the-art results are reported, getting closer to an upper limit than the state-of-the-art methods by a factor of 30\% in AffectNet, the largest in-the-wild FER database by now.
DSNet for Real-Time Driving Scene Semantic Segmentation
Dec 06, 2018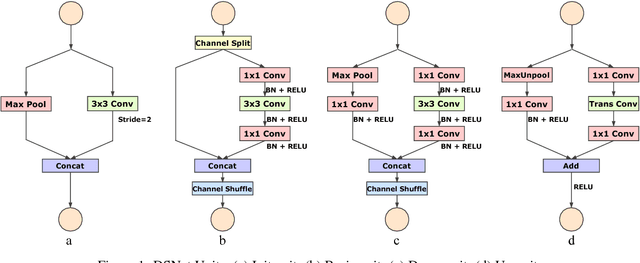
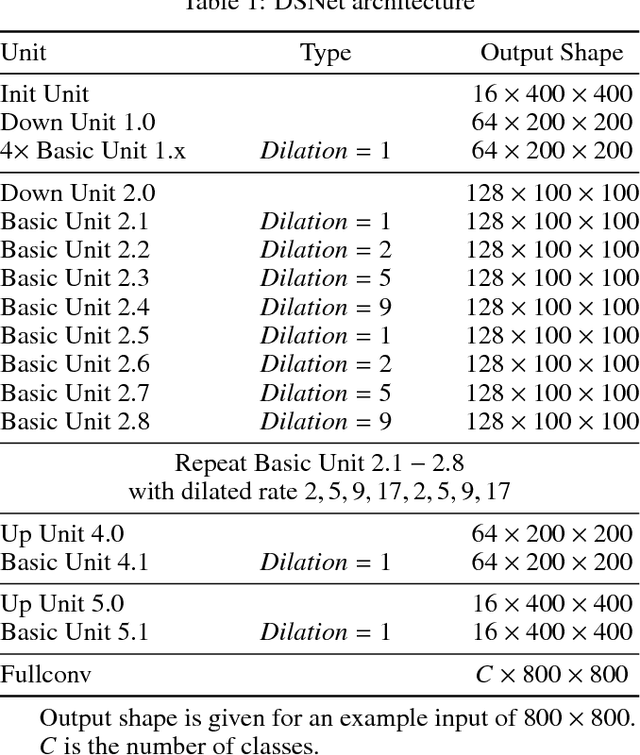
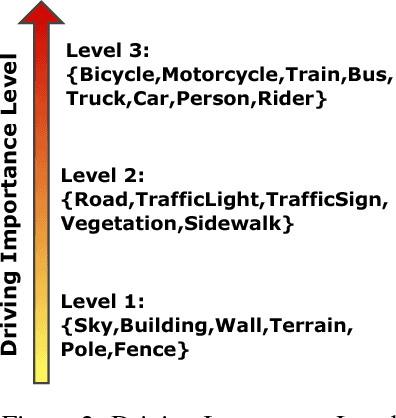
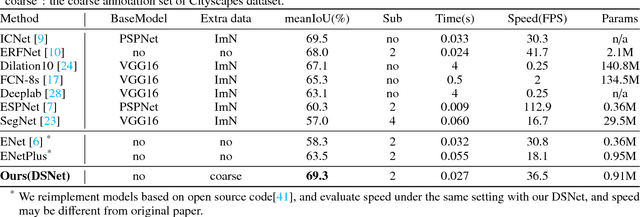
We focus on the very challenging task of semantic segmentation for autonomous driving system. It must deliver decent semantic segmentation result for traffic critical objects real-time. In this paper, we propose a very efficient yet powerful deep neural network for driving scene semantic segmentation termed as Driving Segmentation Network (DSNet). DSNet achieves state-of-the-art balance between accuracy and inference speed through efficient units and architecture design inspired by ShuffleNet V2 and ENet. More importantly, DSNet highlights classes most critical with driving decision making through our novel Driving Importance-weighted Loss. We evaluate DSNet on Cityscapes dataset, our DSNet achieves 71.8% mean Intersection-over-Union (IoU) on validation set and 69.3% on test set. Class-wise IoU scores show that Driving Importance-weighted Loss could improve most driving critical classes by a large margin. Compared with ENet, DSNet is 18.9% more accurate and 1.1+ times faster which implies great potential for autonomous driving application.
A Scoring Method for Driving Safety Credit Using Trajectory Data
Nov 28, 2018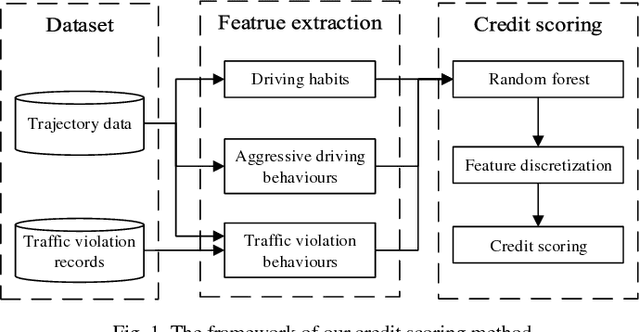
Urban traffic systems worldwide are suffering from severe traffic safety problems. Traffic safety is affected by many complex factors, and heavily related to all drivers' behaviors involved in traffic system. Drivers with aggressive driving behaviors increase the risk of traffic accidents. In order to manage the safety level of traffic system, we propose Driving Safety Credit inspired by credit score in financial security field, and design a scoring method using trajectory data and violation records. First, we extract driving habits, aggressive driving behaviors and traffic violation behaviors from driver's trajectories and traffic violation records. Next, we train a classification model to filtered out irrelevant features. And at last, we score each driver with selected features. We verify our proposed scoring method using 40 days of traffic simulation, and proves the effectiveness of our scoring method.