 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Continuum Robot Shape under External Loading using Spatiotemporal Neural Networks
Oct 25, 2025



This paper presents a learning-based approach for accurately estimating the 3D shape of flexible continuum robots subjected to external loads. The proposed method introduces a spatiotemporal neural network architecture that fuses multi-modal inputs, including current and historical tendon displacement data and RGB images, to generate point clouds representing the robot's deformed configuration. The network integrates a recurrent neural module for temporal feature extraction, an encoding module for spatial feature extraction, and a multi-modal fusion module to combine spatial features extracted from visual data with temporal dependencies from historical actuator inputs. Continuous 3D shape reconstruction is achieved by fitting B\'ezier curves to the predicted point clouds. Experimental validation demonstrates that our approach achieves high precision, with mean shape estimation errors of 0.08 mm (unloaded) and 0.22 mm (loaded), outperforming state-of-the-art methods in shape sensing for TDCRs. The results validate the efficacy of deep learning-based spatiotemporal data fusion for precise shape estimation under loading conditions.
Attention based visual analysis for fast grasp planning with multi-fingered robotic hand
Sep 12, 2018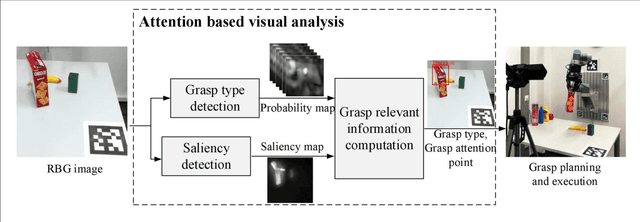
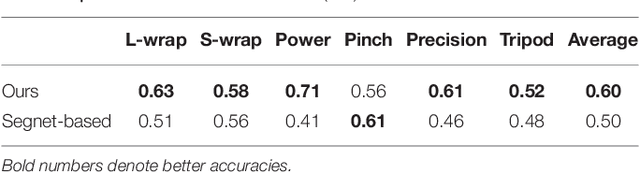
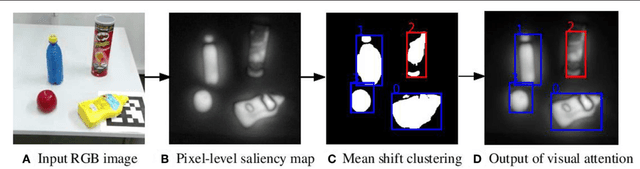
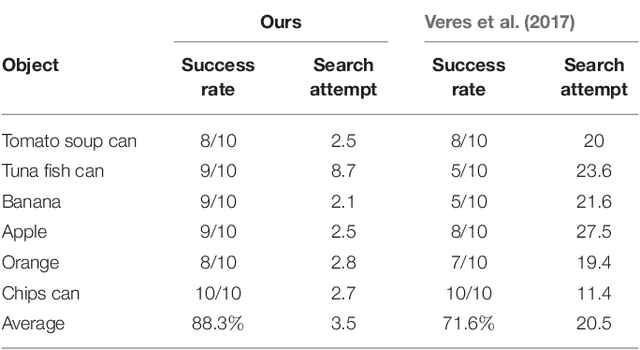
We present an attention based visual analysis framework to compute grasp-relevant information in order to guide grasp planning using a multi-fingered robotic hand. Our approach uses a computational visual attention model to locate regions of interest in a scene, and uses a deep convolutional neural network to detect grasp type and point for a sub-region of the object presented in a region of interest. We demonstrate the proposed framework in object grasping tasks, in which the information generated from the proposed framework is used as prior information to guide the grasp planning. Results show that the proposed framework can not only speed up grasp planning with more stable configurations, but also is able to handle unknown objects. Furthermore, our framework can handle cluttered scenarios. A new Grasp Type Dataset (GTD) that considers 6 commonly used grasp types and covers 12 household objects is also presented.