 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePVI: Plug-in Visual Injection for Vision-Language-Action Models
Mar 13, 2026VLA architectures that pair a pretrained VLM with a flow-matching action expert have emerged as a strong paradigm for language-conditioned manipulation. Yet the VLM, optimized for semantic abstraction and typically conditioned on static visual observations, tends to attenuate fine-grained geometric cues and often lacks explicit temporal evidence for the action expert. Prior work mitigates this by injecting auxiliary visual features, but existing approaches either focus on static spatial representations or require substantial architectural modifications to accommodate temporal inputs, leaving temporal information underexplored. We propose Plug-in Visual Injection (PVI), a lightweight, encoder-agnostic module that attaches to a pretrained action expert and injects auxiliary visual representations via zero-initialized residual pathways, preserving pretrained behavior with only single-stage fine-tuning. Using PVI, we obtain consistent gains over the base policy and a range of competitive alternative injection strategies, and our controlled study shows that temporal video features (V-JEPA2) outperform strong static image features (DINOv2), with the largest gains on multi-phase tasks requiring state tracking and coordination. Real-robot experiments on long-horizon bimanual cloth folding further demonstrate the practicality of PVI beyond simulation.
Diffusion Probabilistic Model Based Accurate and High-Degree-of-Freedom Metasurface Inverse Design
Apr 25, 2023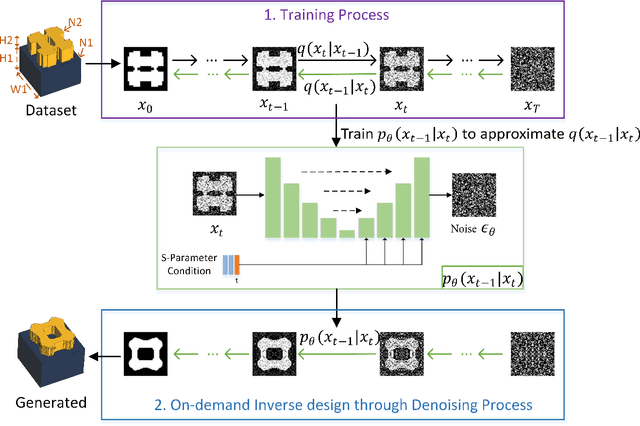
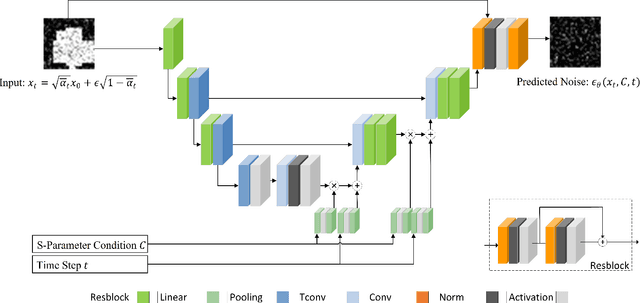
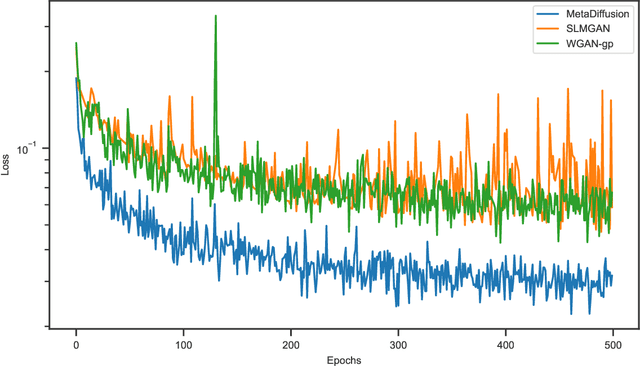
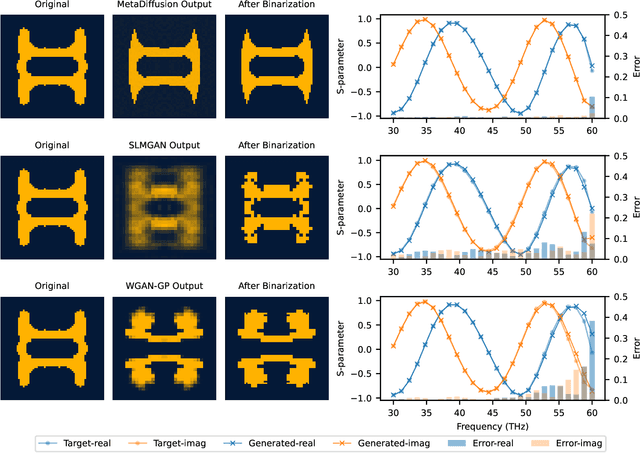
Conventional meta-atom designs rely heavily on researchers' prior knowledge and trial-and-error searches using full-wave simulations, resulting in time-consuming and inefficient processes. Inverse design methods based on optimization algorithms, such as evolutionary algorithms, and topological optimizations, have been introduced to design metamaterials. However, none of these algorithms are general enough to fulfill multi-objective tasks. Recently, deep learning methods represented by Generative Adversarial Networks (GANs) have been applied to inverse design of metamaterials, which can directly generate high-degree-of-freedom meta-atoms based on S-parameter requirements. However, the adversarial training process of GANs makes the network unstable and results in high modeling costs. This paper proposes a novel metamaterial inverse design method based on the diffusion probability theory. By learning the Markov process that transforms the original structure into a Gaussian distribution, the proposed method can gradually remove the noise starting from the Gaussian distribution and generate new high-degree-of-freedom meta-atoms that meet S-parameter conditions, which avoids the model instability introduced by the adversarial training process of GANs and ensures more accurate and high-quality generation results. Experiments have proven that our method is superior to representative methods of GANs in terms of model convergence speed, generation accuracy, and quality.