 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGEX: Democratizing Dexterity with Fully-Actuated Dexterous Hand and Exoskeleton Glove
Jun 05, 2025



This paper introduces GEX, an innovative low-cost dexterous manipulation system that combines the GX11 tri-finger anthropomorphic hand (11 DoF) with the EX12 tri-finger exoskeleton glove (12 DoF), forming a closed-loop teleoperation framework through kinematic retargeting for high-fidelity control. Both components employ modular 3D-printed finger designs, achieving ultra-low manufacturing costs while maintaining full actuation capabilities. Departing from conventional tendon-driven or underactuated approaches, our electromechanical system integrates independent joint motors across all 23 DoF, ensuring complete state observability and accurate kinematic modeling. This full-actuation architecture enables precise bidirectional kinematic calculations, substantially enhancing kinematic retargeting fidelity between the exoskeleton and robotic hand. The proposed system bridges the cost-performance gap in dexterous manipulation research, providing an accessible platform for acquiring high-quality demonstration data to advance embodied AI and dexterous robotic skill transfer learning.
Extremal Region Analysis based Deep Learning Framework for Detecting Defects
Mar 19, 2020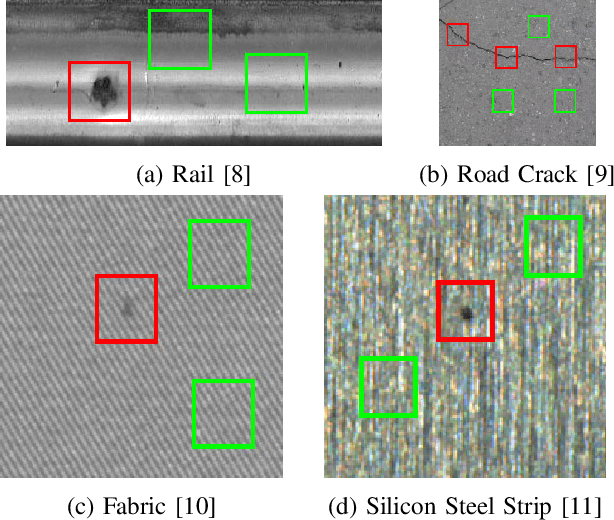

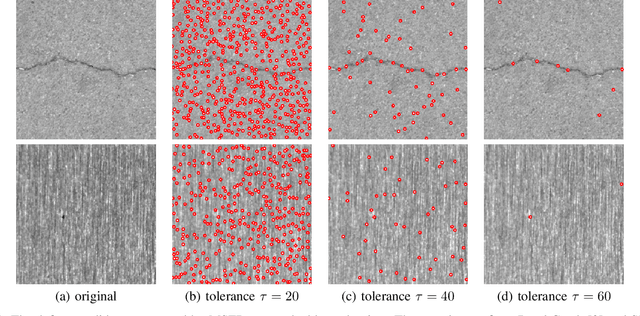
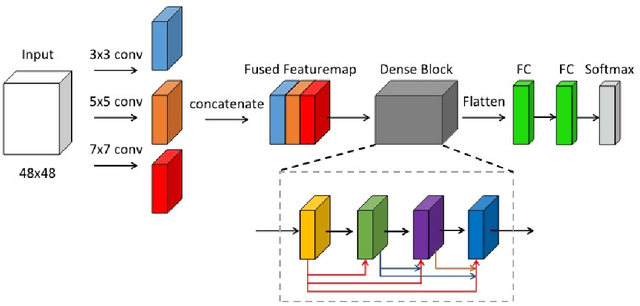
A maximally stable extreme region (MSER) analysis based convolutional neural network (CNN) for unified defect detection framework is proposed in this paper. Our proposed framework utilizes the generality and stability of MSER to generate the desired defect candidates. Then a specific trained binary CNN classifier is adopted over the defect candidates to produce the final defect set. Defect datasets over different categories \blue{are used} in the experiments. More generally, the parameter settings in MSER can be adjusted to satisfy different requirements in various industries (high precision, high recall, etc). Extensive experimental results have shown the efficacy of the proposed framework.