 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Contact-Rich Grasping and Locomotion via Distributed Optimization Enabling Free-Climbing for Multi-Limbed Robots
Jul 05, 2022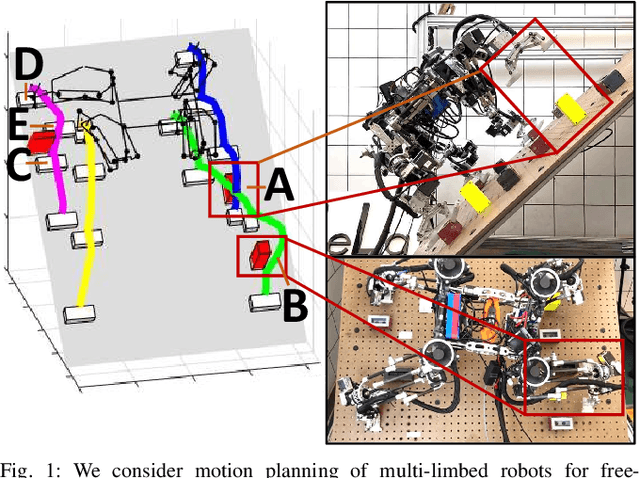
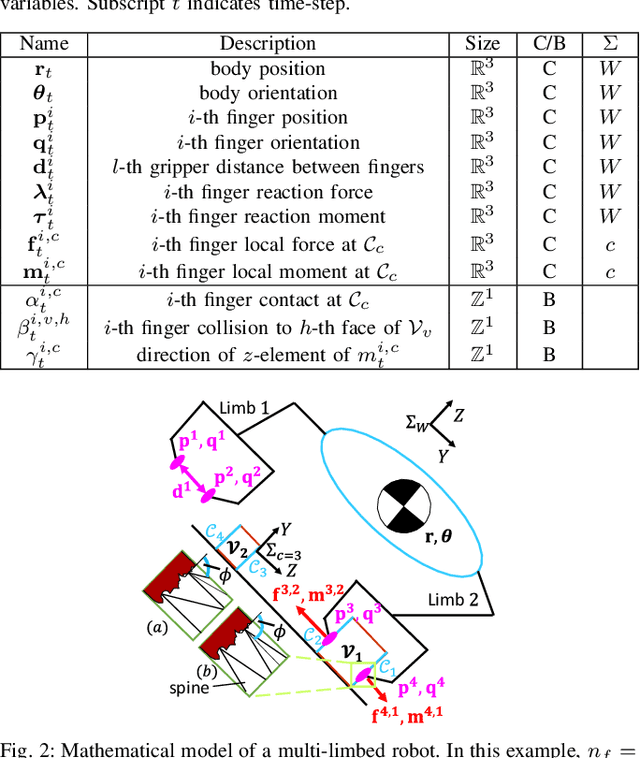
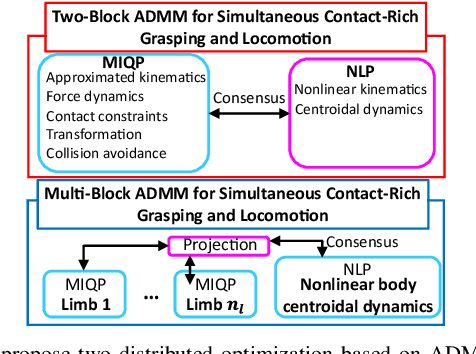
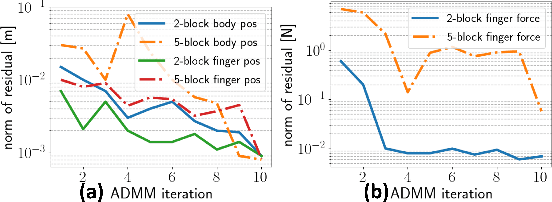
While motion planning of locomotion for legged robots has shown great success, motion planning for legged robots with dexterous multi-finger grasping is not mature yet. We present an efficient motion planning framework for simultaneously solving locomotion (e.g., centroidal dynamics), grasping (e.g., patch contact), and contact (e.g., gait) problems. To accelerate the planning process, we propose distributed optimization frameworks based on Alternating Direction Methods of Multipliers (ADMM) to solve the original large-scale Mixed-Integer NonLinear Programming (MINLP). The resulting frameworks use Mixed-Integer Quadratic Programming (MIQP) to solve contact and NonLinear Programming (NLP) to solve nonlinear dynamics, which are more computationally tractable and less sensitive to parameters. Also, we explicitly enforce patch contact constraints from limit surfaces with micro-spine grippers. We demonstrate our proposed framework in the hardware experiments, showing that the multi-limbed robot is able to realize various motions including free-climbing at a slope angle 45{\deg} with a much shorter planning time.
SCALER: A Tough Versatile Quadruped Free-Climber Robot
Jul 04, 2022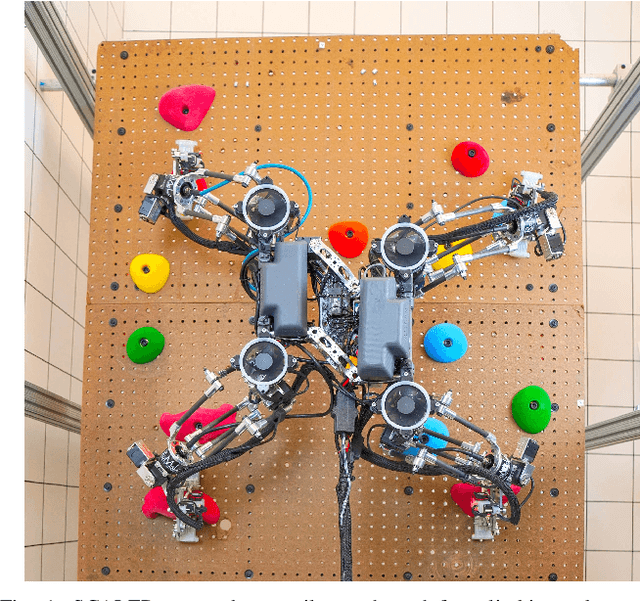
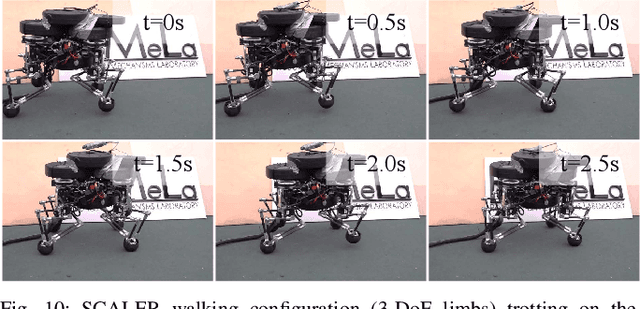
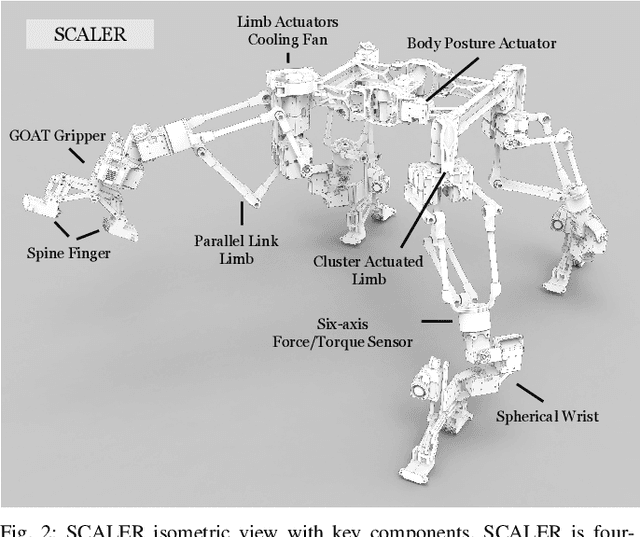
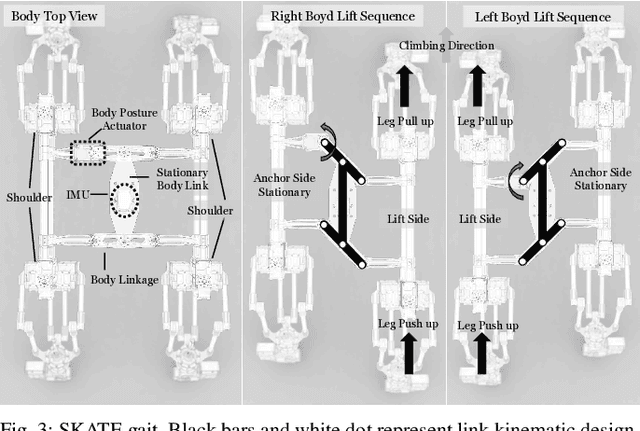
This paper introduces SCALER, a quadrupedal robot that demonstrates climbing on bouldering walls, overhangs, and ceilings and trotting on the ground. SCALER is one of the first high-degrees of freedom four-limbed robots that can free-climb under the Earth's gravity and one of the most mechanically efficient quadrupeds on the ground. Where other state-of-the-art climbers are specialized in climbing itself, SCALER promises practical free-climbing with payload \textit{and} ground locomotion, which realizes true versatile mobility. A new climbing gait, SKATE gait, increases the payload by utilizing the SCALER body linkage mechanism. SCALER achieves a maximum normalized locomotion speed of $1.87$ /s, or $0.56$ m/s on the ground and $1.2$ /min, or $0.42$ m/min in bouldering wall climbing. Payload capacity reaches $233$ % of the SCALER weight on the ground and $35$ % on the vertical wall. Our GOAT gripper, a mechanically adaptable underactuated two-finger gripper, successfully grasps convex and non-convex objects and supports SCALER.
Robust Pivoting: Exploiting Frictional Stability Using Bilevel Optimization
Mar 22, 2022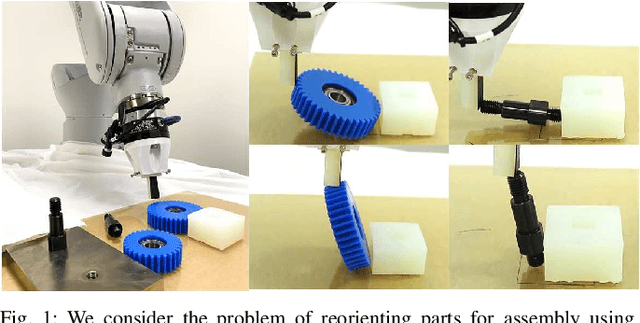
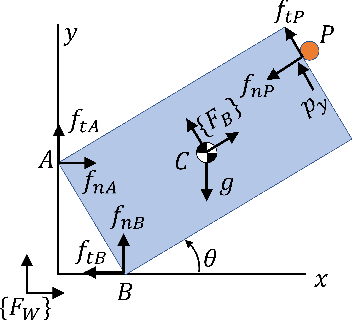
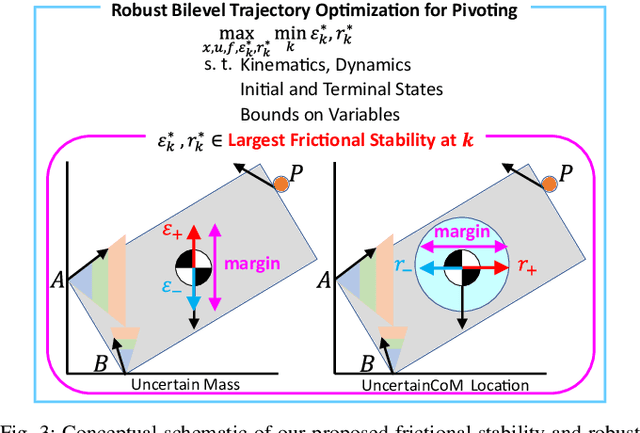
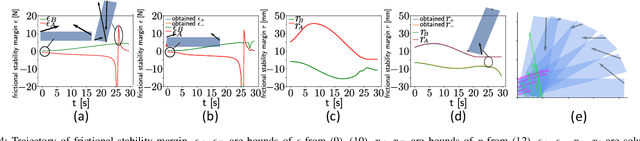
Generalizable manipulation requires that robots be able to interact with novel objects and environment. This requirement makes manipulation extremely challenging as a robot has to reason about complex frictional interaction with uncertainty in physical properties of the object. In this paper, we study robust optimization for control of pivoting manipulation in the presence of uncertainties. We present insights about how friction can be exploited to compensate for the inaccuracies in the estimates of the physical properties during manipulation. In particular, we derive analytical expressions for stability margin provided by friction during pivoting manipulation. This margin is then used in a bilevel trajectory optimization algorithm to design a controller that maximizes this stability margin to provide robustness against uncertainty in physical properties of the object. We demonstrate our proposed method using a 6 DoF manipulator for manipulating several different objects.
Chance-Constrained Optimization in Contact-Rich Systems for Robust Manipulation
Mar 05, 2022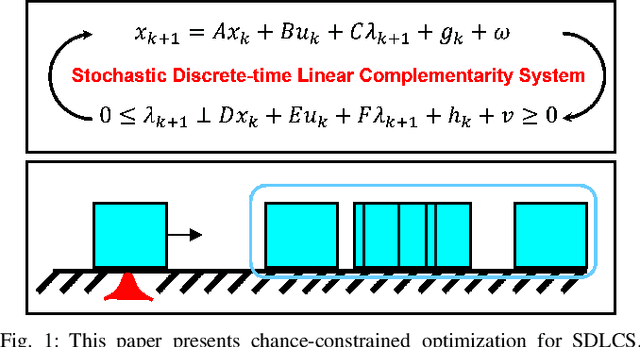
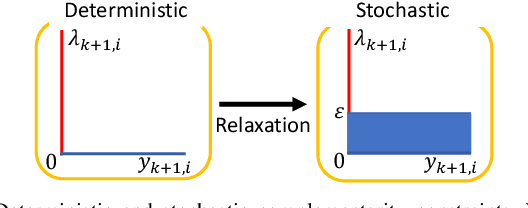
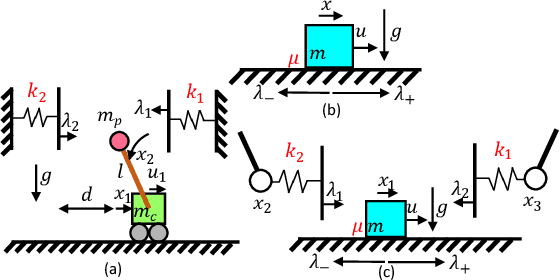
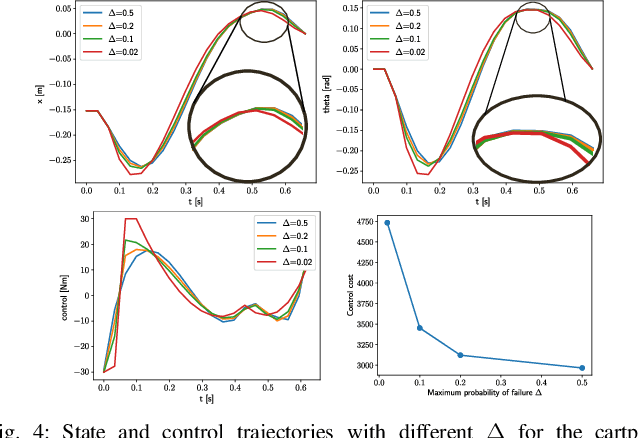
This paper presents a chance-constrained formulation for robust trajectory optimization during manipulation. In particular, we present a chance-constrained optimization for Stochastic Discrete-time Linear Complementarity Systems (SDLCS). To solve the optimization problem, we formulate Mixed-Integer Quadratic Programming with Chance Constraints (MIQPCC). In our formulation, we explicitly consider joint chance constraints for complementarity as well as states to capture the stochastic evolution of dynamics. We evaluate robustness of our optimized trajectories in simulation on several systems. The proposed approach outperforms some recent approaches for robust trajectory optimization for SDLCS.
* 9 pages, 9 figures
An Under-Actuated Whippletree Mechanism Gripper based on Multi-Objective Design Optimization with Auto-Tuned Weights
Sep 30, 2021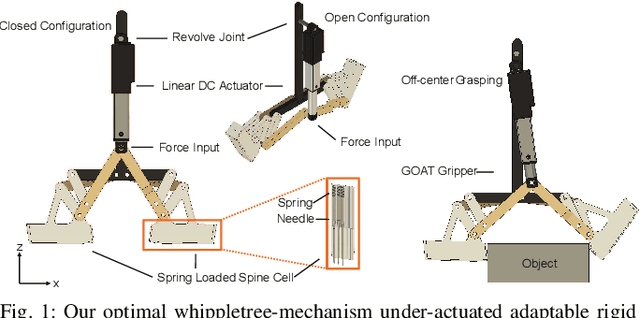
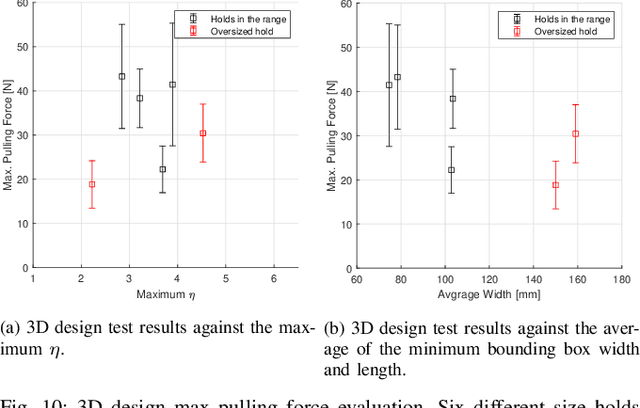
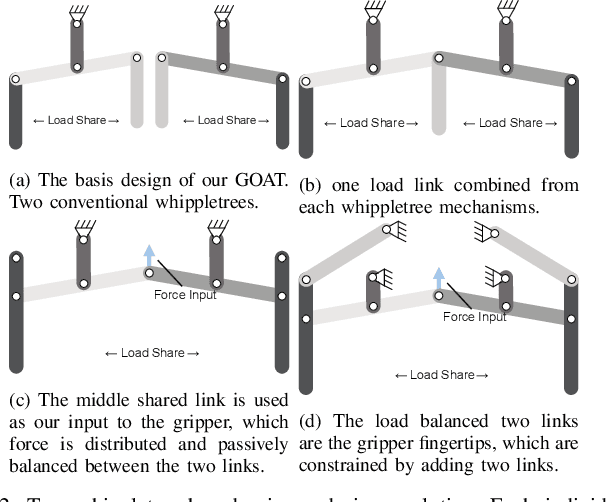
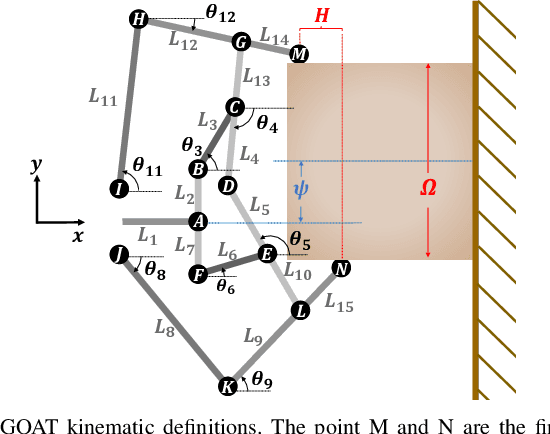
Current rigid linkage grippers are limited in flexibility, and gripper design optimality relies on expertise, experiments, or arbitrary parameters. Our proposed rigid gripper can accommodate irregular and off-center objects through a whippletree mechanism, improving adaptability. We present a whippletree-based rigid under-actuated gripper and its parametric design multi-objective optimization for a one-wall climbing task. Our proposed objective function considers kinematics and grasping forces simultaneously with a mathematical metric based on a model of an object environment. Our multi-objective problem is formulated as a single kinematic objective function with auto-tuning force-based weight. Our results indicate that our proposed objective function determines optimal parameters and kinematic ranges for our under-actuated gripper in the task environment with sufficient grasping forces.
LTO: Lazy Trajectory Optimization with Graph-Search Planning for High DOF Robots in Cluttered Environments
Mar 23, 2021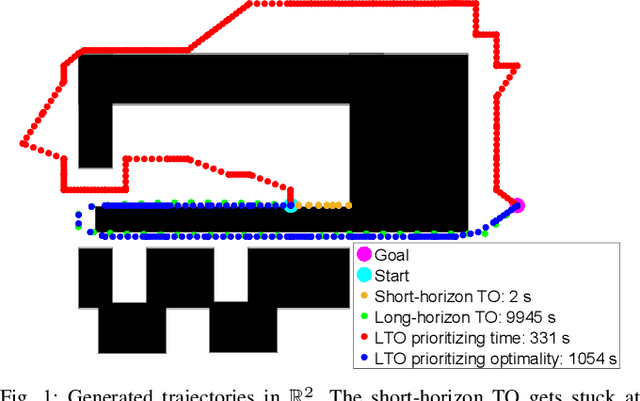
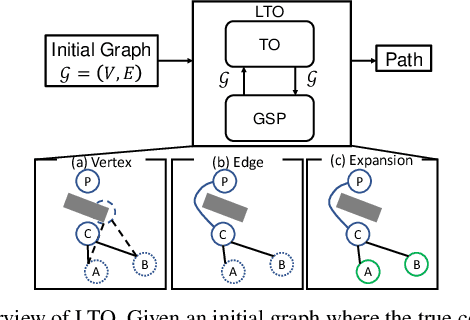
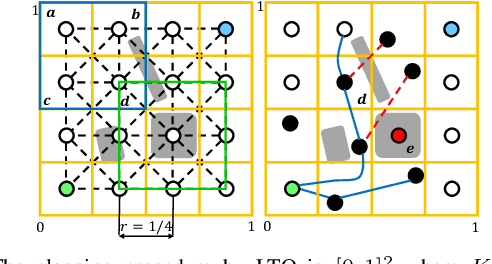
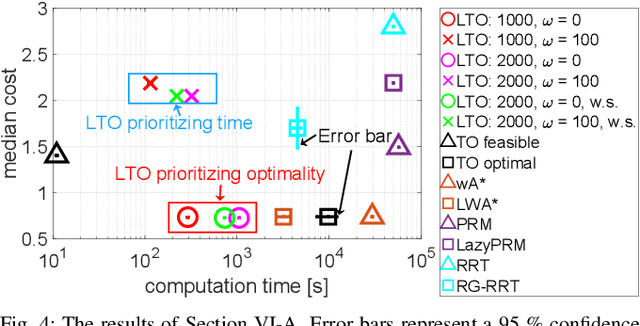
Although Trajectory Optimization (TO) is one of the most powerful motion planning tools, it suffers from expensive computational complexity as a time horizon increases in cluttered environments. It can also fail to converge to a globally optimal solution. In this paper, we present Lazy Trajectory Optimization (LTO) that unifies local short-horizon TO and global Graph-Search Planning (GSP) to generate a long-horizon global optimal trajectory. LTO solves TO with the same constraints as the original long-horizon TO with improved time complexity. We also propose a TO-aware cost function that can balance both solution cost and planning time. Since LTO solves many nearly identical TO in a roadmap, it can provide an informed warm-start for TO to accelerate the planning process. We also present proofs of the computational complexity and optimality of LTO. Finally, we demonstrate LTO's performance on motion planning problems for a 2 DOF free-flying robot and a 21 DOF legged robot, showing that LTO outperforms existing algorithms in terms of its runtime and reliability.
Risk-Aware Motion Planning for a Limbed Robot with Stochastic Gripping Forces Using Nonlinear Programming
Jun 06, 2020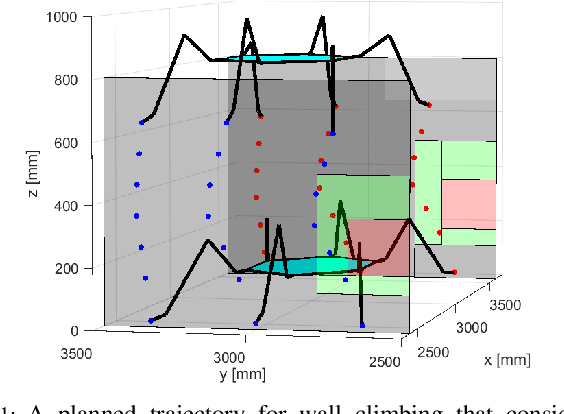
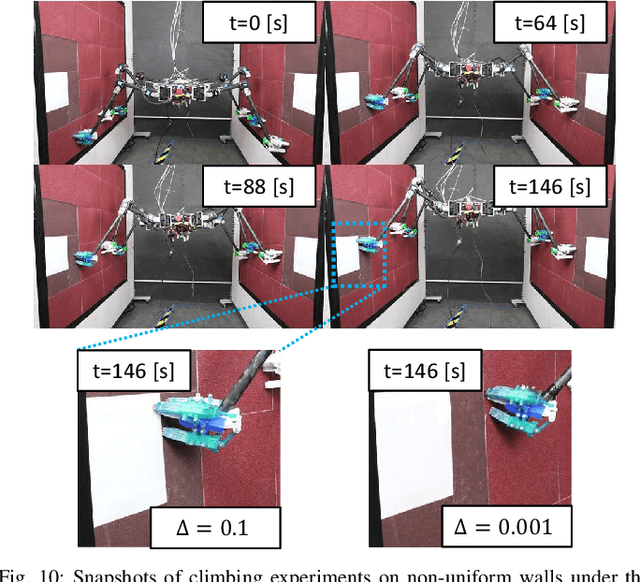
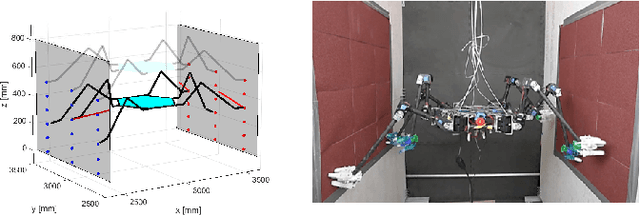
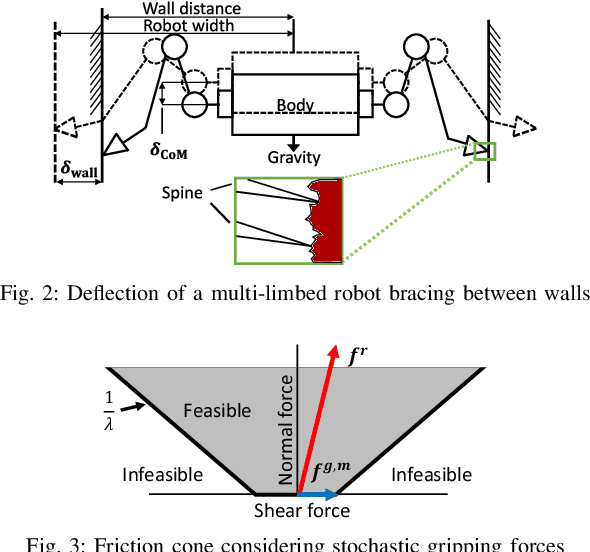
We present a motion planning algorithm with probabilistic guarantees for limbed robots with stochastic gripping forces. Planners based on deterministic models with a worst-case uncertainty can be conservative and inflexible to consider the stochastic behavior of the contact, especially when a gripper is installed. Our proposed planner enables the robot to simultaneously plan its pose and contact force trajectories while considering the risk associated with the gripping forces. Our planner is formulated as a nonlinear programming problem with chance constraints, which allows the robot to generate a variety of motions based on different risk bounds. To model the gripping forces as random variables, we employ Gaussian Process regression. We validate our proposed motion planning algorithm on an 11.5 kg six-limbed robot for two-wall climbing. Our results show that our proposed planner generates various trajectories (e.g., avoiding low friction terrain under the low risk bound, choosing an unstable but faster gait under the high risk bound) by changing the probability of risk based on various specifications.