 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Under-Actuated Whippletree Mechanism Gripper based on Multi-Objective Design Optimization with Auto-Tuned Weights
Sep 30, 2021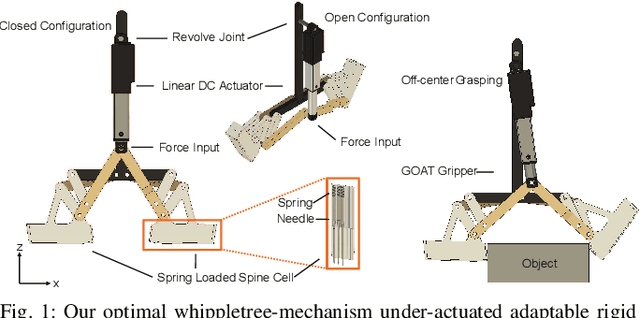
Current rigid linkage grippers are limited in flexibility, and gripper design optimality relies on expertise, experiments, or arbitrary parameters. Our proposed rigid gripper can accommodate irregular and off-center objects through a whippletree mechanism, improving adaptability. We present a whippletree-based rigid under-actuated gripper and its parametric design multi-objective optimization for a one-wall climbing task. Our proposed objective function considers kinematics and grasping forces simultaneously with a mathematical metric based on a model of an object environment. Our multi-objective problem is formulated as a single kinematic objective function with auto-tuning force-based weight. Our results indicate that our proposed objective function determines optimal parameters and kinematic ranges for our under-actuated gripper in the task environment with sufficient grasping forces.