 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgWorld: Learning Surgical Robot Policies from Videos via World Modeling
Dec 30, 2025Data scarcity remains a fundamental barrier to achieving fully autonomous surgical robots. While large scale vision language action (VLA) models have shown impressive generalization in household and industrial manipulation by leveraging paired video action data from diverse domains, surgical robotics suffers from the paucity of datasets that include both visual observations and accurate robot kinematics. In contrast, vast corpora of surgical videos exist, but they lack corresponding action labels, preventing direct application of imitation learning or VLA training. In this work, we aim to alleviate this problem by learning policy models from SurgWorld, a world model designed for surgical physical AI. We curated the Surgical Action Text Alignment (SATA) dataset with detailed action description specifically for surgical robots. Then we built SurgeWorld based on the most advanced physical AI world model and SATA. It's able to generate diverse, generalizable and realistic surgery videos. We are also the first to use an inverse dynamics model to infer pseudokinematics from synthetic surgical videos, producing synthetic paired video action data. We demonstrate that a surgical VLA policy trained with these augmented data significantly outperforms models trained only on real demonstrations on a real surgical robot platform. Our approach offers a scalable path toward autonomous surgical skill acquisition by leveraging the abundance of unlabeled surgical video and generative world modeling, thus opening the door to generalizable and data efficient surgical robot policies.
Parcellation of fMRI Datasets with ICA and PLS-A Data Driven Approach
Apr 21, 2010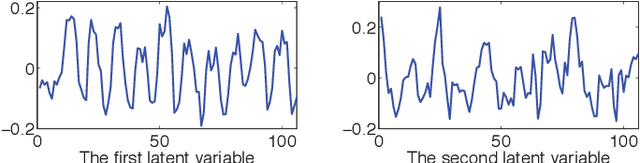



Inter-subject parcellation of functional Magnetic Resonance Imaging (fMRI) data based on a standard General Linear Model (GLM)and spectral clustering was recently proposed as a means to alleviate the issues associated with spatial normalization in fMRI. However, for all its appeal, a GLM-based parcellation approach introduces its own biases, in the form of a priori knowledge about the shape of Hemodynamic Response Function (HRF) and task-related signal changes, or about the subject behaviour during the task. In this paper, we introduce a data-driven version of the spectral clustering parcellation, based on Independent Component Analysis (ICA) and Partial Least Squares (PLS) instead of the GLM. First, a number of independent components are automatically selected. Seed voxels are then obtained from the associated ICA maps and we compute the PLS latent variables between the fMRI signal of the seed voxels (which covers regional variations of the HRF) and the principal components of the signal across all voxels. Finally, we parcellate all subjects data with a spectral clustering of the PLS latent variables. We present results of the application of the proposed method on both single-subject and multi-subject fMRI datasets. Preliminary experimental results, evaluated with intra-parcel variance of GLM t-values and PLS derived t-values, indicate that this data-driven approach offers improvement in terms of parcellation accuracy over GLM based techniques.
* 8 pages, 5 figures, P12th International Conference of Medical Image Computing and Computer-Assisted Intervention (MICCAI 2009)