 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-efficient Cooperative Offloading for Edge Computing-enabled Vehicular Networks
Nov 01, 2021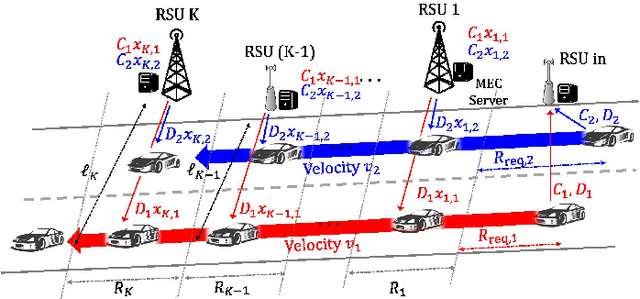
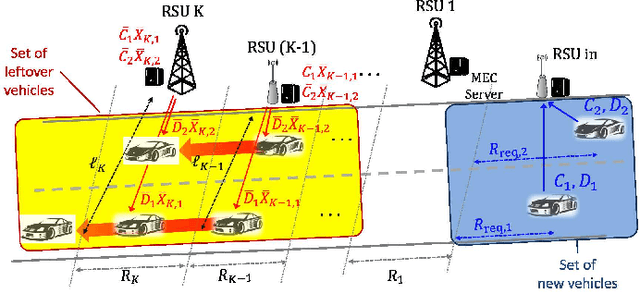
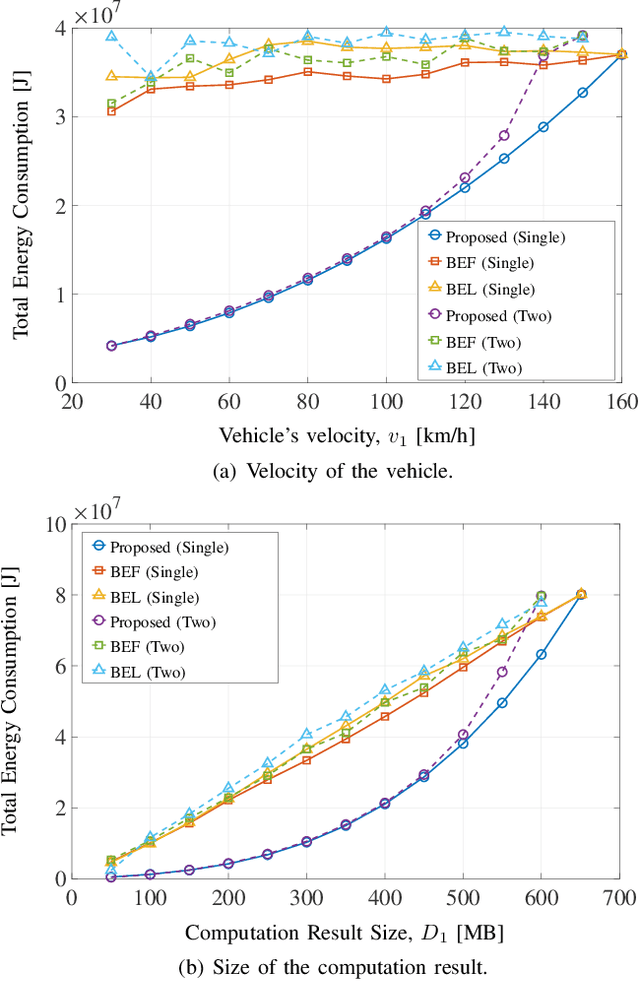
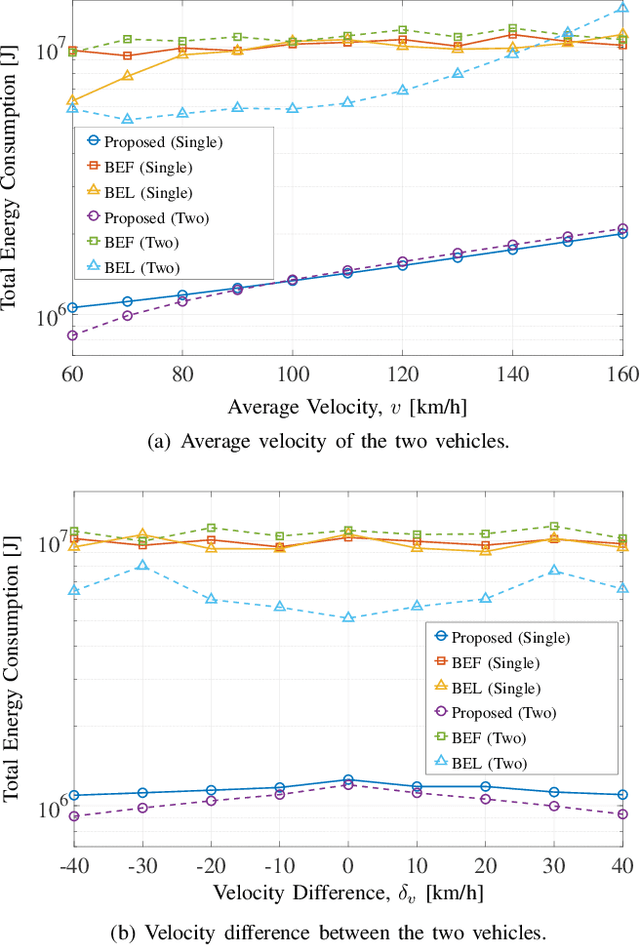
Edge computing technology has great potential to improve various computation-intensive applications in vehicular networks by providing sufficient computation resources for vehicles. However, it is still a challenge to fully unleash the potential of edge computing in edge computing-enabled vehicular networks. In this paper, we develop the energy-efficient cooperative offloading scheme for edge computing-enabled vehicular networks, which splits the task into multiple subtasks and offloads them to different roadside units (RSUs) located ahead along the route of the vehicle. We first establish novel cooperative offloading models for the offline and online scenarios in edge computing-enabled vehicular networks. In each offloading scenario, we formulate the total energy minimization with respect to the task splitting ratio, computation resource, and communication resource. In the offline scenario, we equivalently transform the original problem to a convex problem and obtain optimal solutions for multi-vehicle case and single-vehicle case, respectively. Furthermore, we show that the method proposed for the offline scenario can also be applied to solve the optimization problem in the online scenario. Finally, through numerical results, by analyzing the impact of network parameters on the total energy consumption, we verify that our proposed solution consumes lower energy than baseline schemes.
ML and MAP Device Activity Detections for Grant-Free Massive Access in Multi-Cell Networks
Jun 19, 2021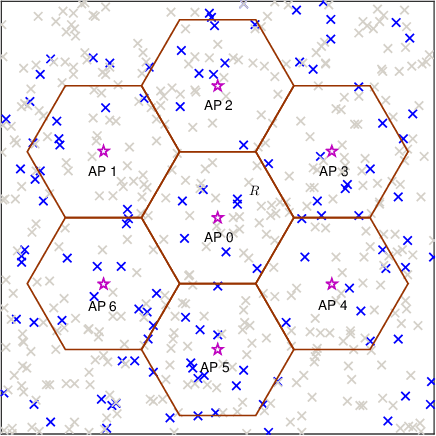
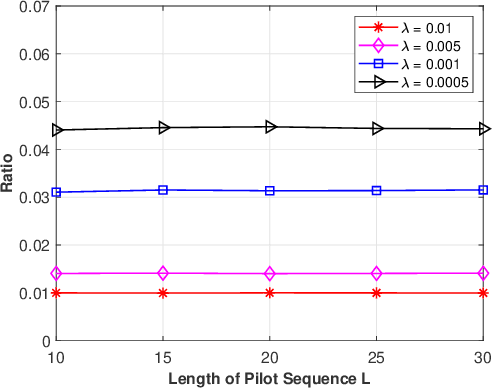
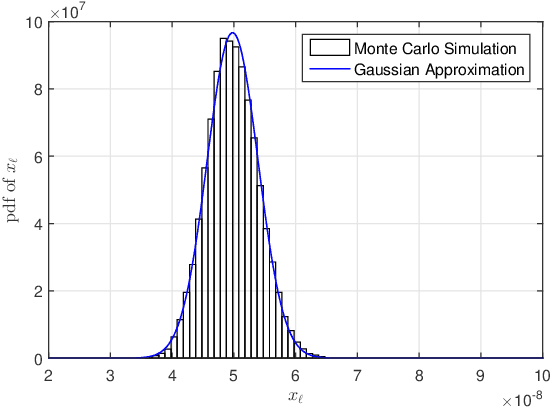
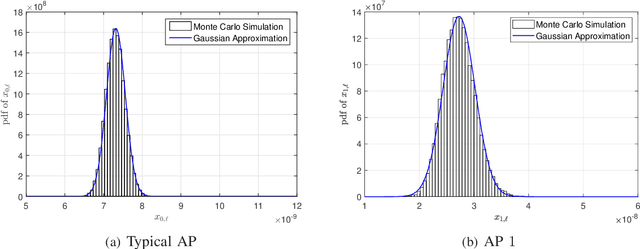
Device activity detection is one main challenge in grant-free massive access, which is recently proposed to support massive machine-type communications (mMTC). Existing solutions for device activity detection fail to consider inter-cell interference generated by massive IoT devices or important prior information on device activities and inter-cell interference. In this paper, given different numbers of observations and network parameters, we consider both non-cooperative device activity detection and cooperative device activity detection in a multi-cell network, consisting of many access points (APs) and IoT devices. Under each activity detection mechanism, we consider the joint maximum likelihood (ML) estimation and joint maximum a posterior probability (MAP) estimation of both device activities and interference powers, utilizing tools from probability, stochastic geometry, and optimization. Each estimation problem is a challenging non-convex problem, and a coordinate descent algorithm is proposed to obtain a stationary point. Each proposed joint ML estimation extends the existing one for a single-cell network by considering the estimation of interference powers, together with the estimation of device activities. Each proposed joint MAP estimation further enhances the corresponding joint ML estimation by exploiting prior distributions of device activities and interference powers. The proposed joint ML estimation and joint MAP estimation under cooperative detection outperform the respective ones under non-cooperative detection at the costs of increasing backhaul burden, knowledge of network parameters, and computational complexities.
Sample-based and Feature-based Federated Learning via Mini-batch SSCA
Apr 13, 2021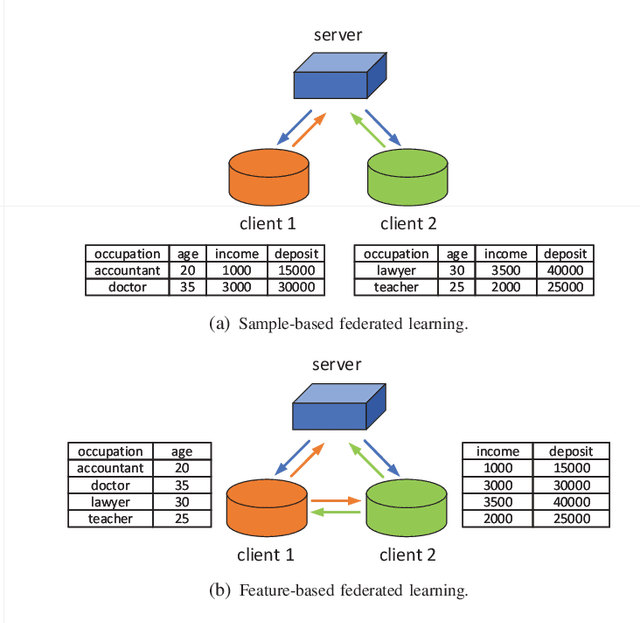
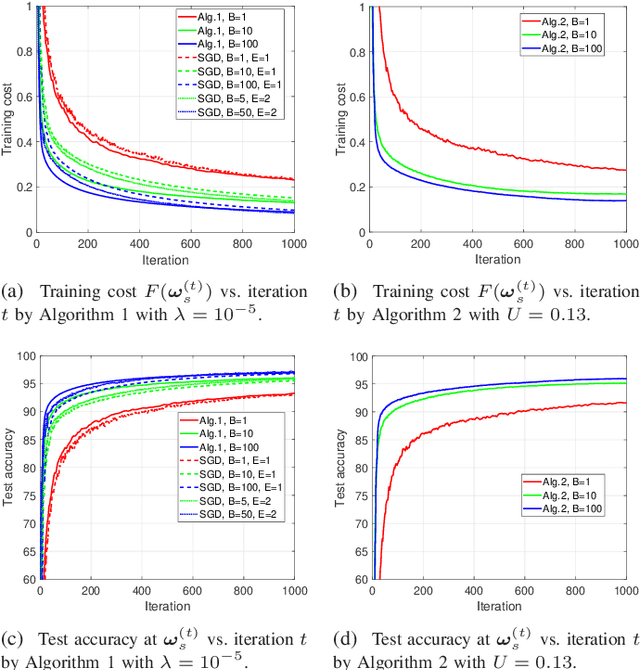
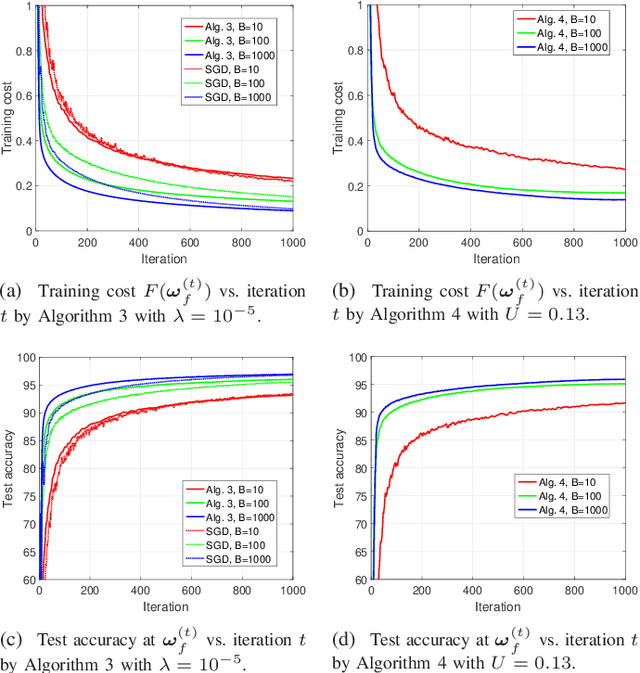
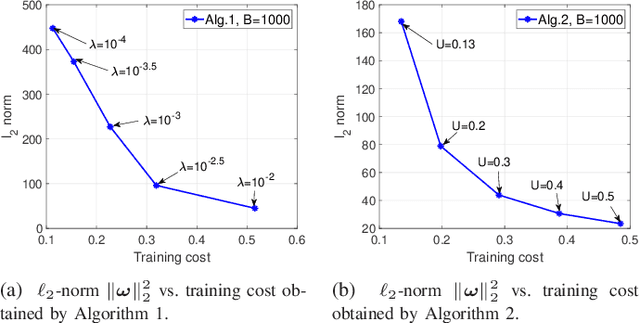
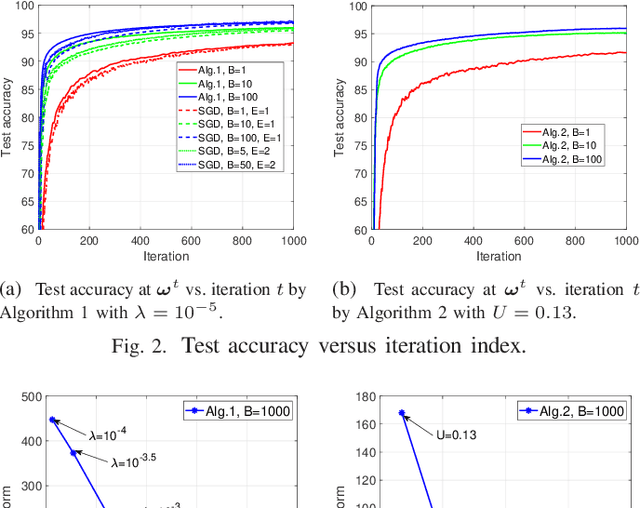
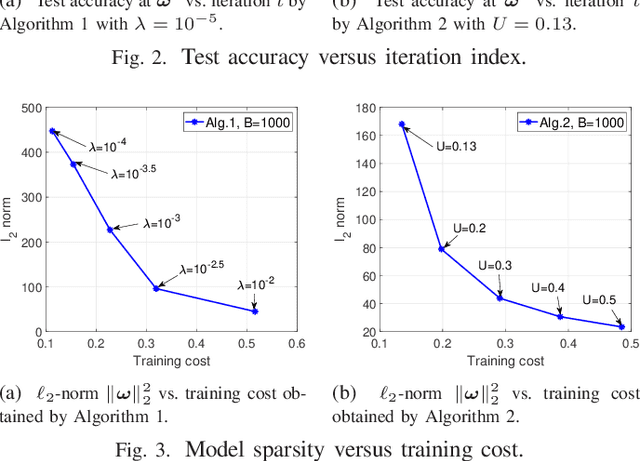
Due to the resource consumption for transmitting massive data and the concern for exposing sensitive data, it is impossible or undesirable to upload clients' local databases to a central server. Thus, federated learning has become a hot research area in enabling the collaborative training of machine learning models among multiple clients that hold sensitive local data. Nevertheless, unconstrained federated optimization has been studied mainly using stochastic gradient descent (SGD), which may converge slowly, and constrained federated optimization, which is more challenging, has not been investigated so far. This paper investigates sample-based and feature-based federated optimization, respectively, and considers both the unconstrained problem and the constrained problem for each of them. We propose federated learning algorithms using stochastic successive convex approximation (SSCA) and mini-batch techniques. We show that the proposed algorithms can preserve data privacy through the model aggregation mechanism, and their security can be enhanced via additional privacy mechanisms. We also show that the proposed algorithms converge to Karush-Kuhn-Tucker (KKT) points of the respective federated optimization problems. Besides, we customize the proposed algorithms to application examples and show that all updates have closed-form expressions. Finally, numerical experiments demonstrate the inherent advantages of the proposed algorithms in convergence speeds, communication costs, and model specifications.
Sample-based Federated Learning via Mini-batch SSCA
Mar 17, 2021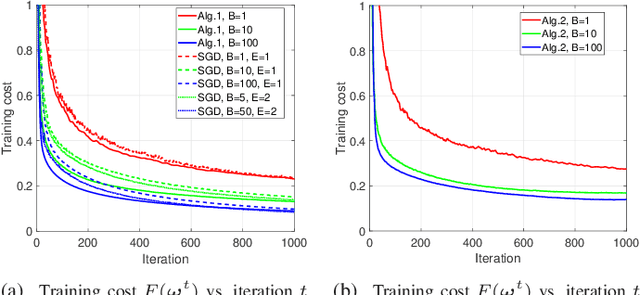
In this paper, we investigate unconstrained and constrained sample-based federated optimization, respectively. For each problem, we propose a privacy preserving algorithm using stochastic successive convex approximation (SSCA) techniques, and show that it can converge to a Karush-Kuhn-Tucker (KKT) point. To the best of our knowledge, SSCA has not been used for solving federated optimization, and federated optimization with nonconvex constraints has not been investigated. Next, we customize the two proposed SSCA-based algorithms to two application examples, and provide closed-form solutions for the respective approximate convex problems at each iteration of SSCA. Finally, numerical experiments demonstrate inherent advantages of the proposed algorithms in terms of convergence speed, communication cost and model specification.
Graph Attention Tracking
Nov 23, 2020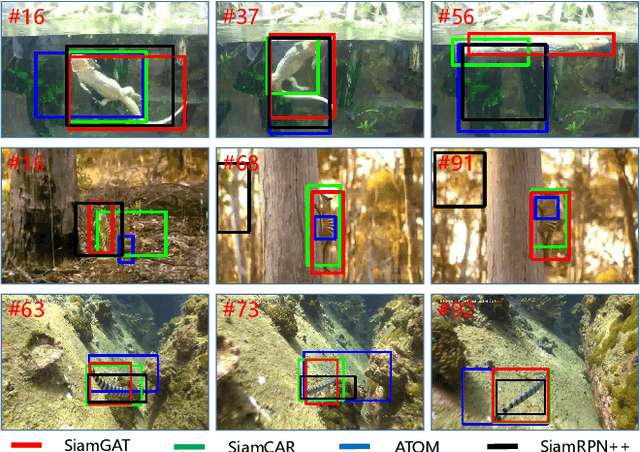

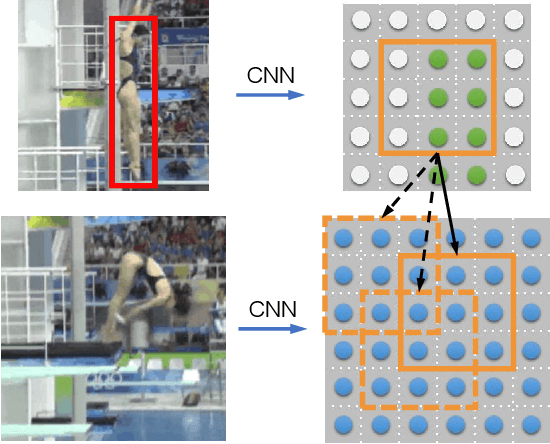
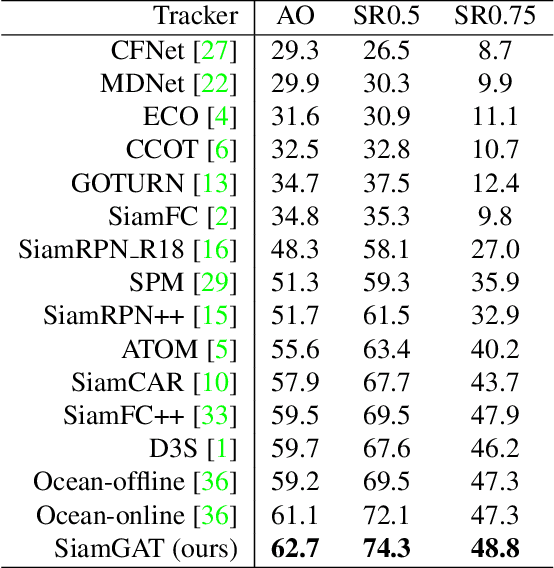
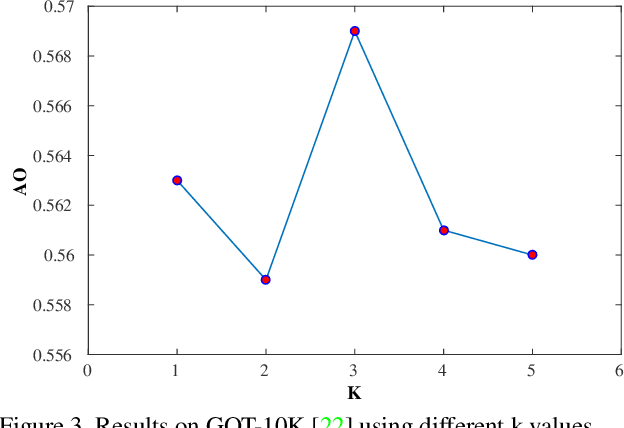
Siamese network based trackers formulate the visual tracking task as a similarity matching problem. Almost all popular Siamese trackers realize the similarity learning via convolutional feature cross-correlation between a target branch and a search branch. However, since the size of target feature region needs to be pre-fixed, these cross-correlation base methods suffer from either reserving much adverse background information or missing a great deal of foreground information. Moreover, the global matching between the target and search region also largely neglects the target structure and part-level information. In this paper, to solve the above issues, we propose a simple target-aware Siamese graph attention network for general object tracking. We propose to establish part-to-part correspondence between the target and the search region with a complete bipartite graph, and apply the graph attention mechanism to propagate target information from the template feature to the search feature. Further, instead of using the pre-fixed region cropping for template-feature-area selection, we investigate a target-aware area selection mechanism to fit the size and aspect ratio variations of different objects. Experiments on challenging benchmarks including GOT-10k, UAV123, OTB-100 and LaSOT demonstrate that the proposed SiamGAT outperforms many state-of-the-art trackers and achieves leading performance. Code is available at: https://git.io/SiamGAT
Jointly Sparse Signal Recovery and Support Recovery via Deep Learning with Applications in MIMO-based Grant-Free Random Access
Sep 08, 2020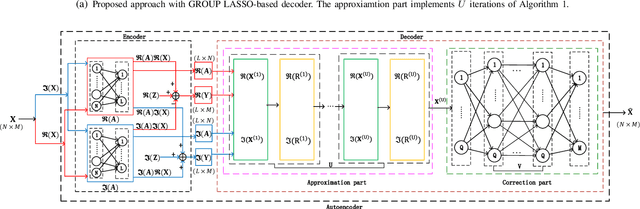
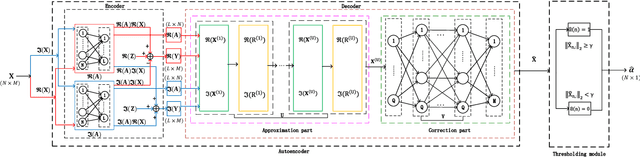
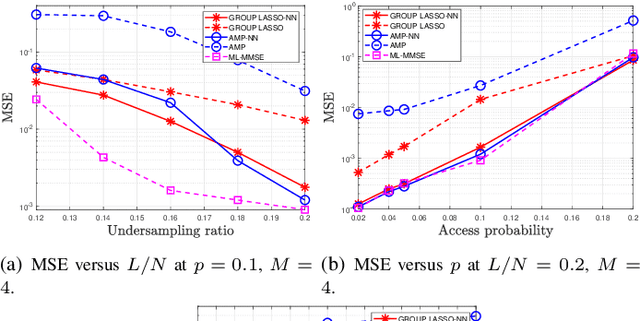
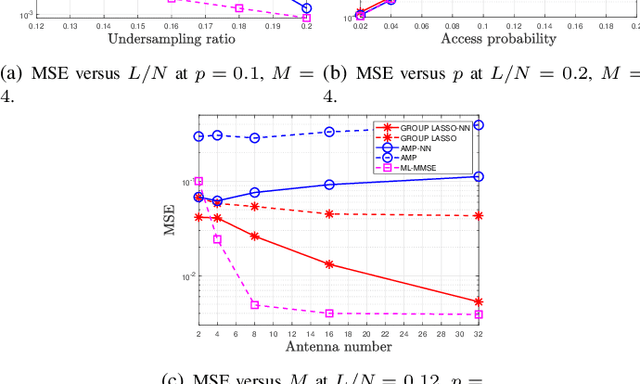
In this paper, we investigate jointly sparse signal recovery and jointly sparse support recovery in Multiple Measurement Vector (MMV) models for complex signals, which arise in many applications in communications and signal processing. Recent key applications include channel estimation and device activity detection in MIMO-based grant-free random access which is proposed to support massive machine-type communications (mMTC) for Internet of Things (IoT). Utilizing techniques in compressive sensing, optimization and deep learning, we propose two model-driven approaches, based on the standard auto-encoder structure for real numbers. One is to jointly design the common measurement matrix and jointly sparse signal recovery method, and the other aims to jointly design the common measurement matrix and jointly sparse support recovery method. The proposed model-driven approaches can effectively utilize features of sparsity patterns in designing common measurement matrices and adjusting model-driven decoders, and can greatly benefit from the underlying state-of-the-art recovery methods with theoretical guarantee. Hence, the obtained common measurement matrices and recovery methods can significantly outperform the underlying advanced recovery methods. We conduct extensive numerical results on channel estimation and device activity detection in MIMO-based grant-free random access. The numerical results show that the proposed approaches provide pilot sequences and channel estimation or device activity detection methods which can achieve higher estimation or detection accuracy with shorter computation time than existing ones. Furthermore, the numerical results explain how such gains are achieved via the proposed approaches.
Improving auto-encoder novelty detection using channel attention and entropy minimization
Jul 03, 2020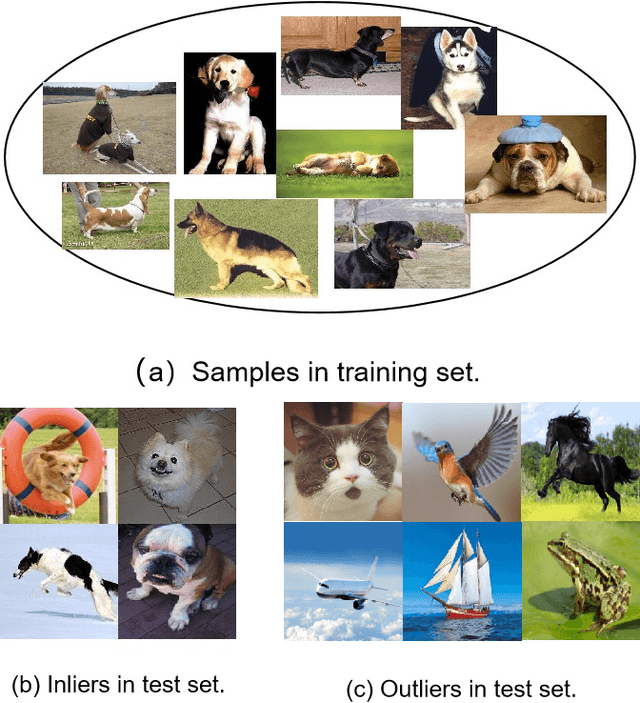
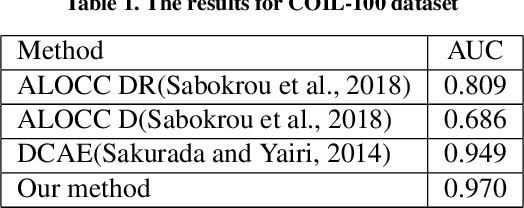
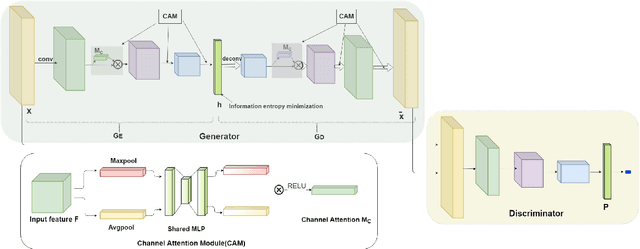
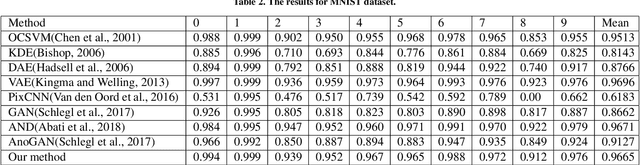
Novelty detection is a important research area which mainly solves the classification problem of inliers which usually consists of normal samples and outliers composed of abnormal samples. We focus on the role of auto-encoder in novelty detection and further improved the performance of such methods based on auto-encoder through two main contributions. Firstly, we introduce attention mechanism into novelty detection. Under the action of attention mechanism, auto-encoder can pay more attention to the representation of inlier samples through adversarial training. Secondly, we try to constrain the expression of the latent space by information entropy. Experimental results on three public datasets show that the proposed method has potential performance for novelty detection.
SiamCAR: Siamese Fully Convolutional Classification and Regression for Visual Tracking
Dec 13, 2019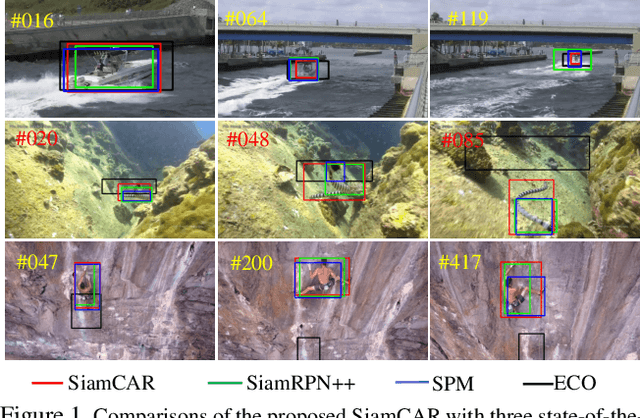
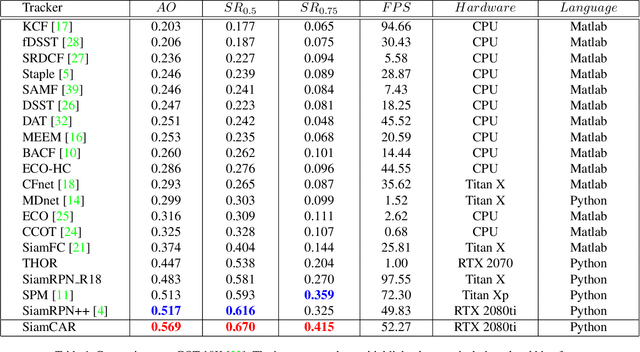
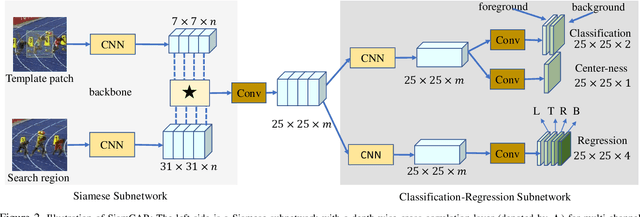
By decomposing the visual tracking task into two subproblems as classification for pixel category and regression for object bounding box at this pixel, we propose a novel fully convolutional Siamese network to solve visual tracking end-to-end in a per-pixel manner. The proposed framework SiamCAR consists of two simple subnetworks: one Siamese subnetwork for feature extraction and one classification-regression subnetwork for bounding box prediction. Our framework takes ResNet-50 as backbone. Different from state-of-the-art trackers like Siamese-RPN, SiamRPN++ and SPM, which are based on region proposal, the proposed framework is both proposal and anchor free. Consequently, we are able to avoid the tricky hyper-parameter tuning of anchors and reduce human intervention. The proposed framework is simple, neat and effective. Extensive experiments and comparisons with state-of-the-art trackers are conducted on many challenging benchmarks like GOT-10K, LaSOT, UAV123 and OTB-50. Without bells and whistles, our SiamCAR achieves the leading performance with a considerable real-time speed.
Statistical Analysis of Stationary Solutions of Coupled Nonconvex Nonsmooth Empirical Risk Minimization
Oct 06, 2019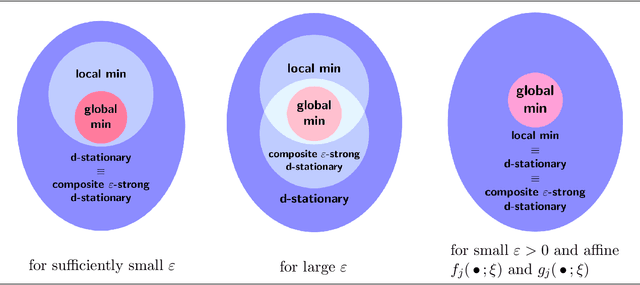
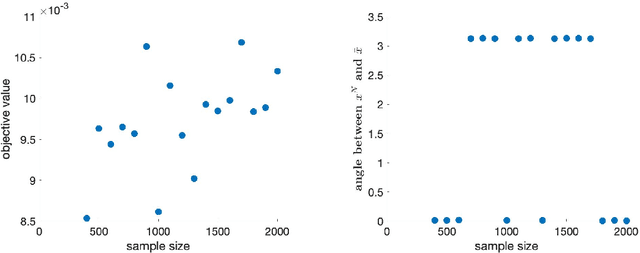
This paper has two main goals: (a) establish several statistical properties---consistency, asymptotic distributions, and convergence rates---of stationary solutions and values of a class of coupled nonconvex and nonsmoothempirical risk minimization problems, and (b) validate these properties by a noisy amplitude-based phase retrieval problem, the latter being of much topical interest.Derived from available data via sampling, these empirical risk minimization problems are the computational workhorse of a population risk model which involves the minimization of an expected value of a random functional. When these minimization problems are nonconvex, the computation of their globally optimal solutions is elusive. Together with the fact that the expectation operator cannot be evaluated for general probability distributions, it becomes necessary to justify whether the stationary solutions of the empirical problems are practical approximations of the stationary solution of the population problem. When these two features, general distribution and nonconvexity, are coupled with nondifferentiability that often renders the problems "non-Clarke regular", the task of the justification becomes challenging. Our work aims to address such a challenge within an algorithm-free setting. The resulting analysis is therefore different from the much of the analysis in the recent literature that is based on local search algorithms. Furthermore, supplementing the classical minimizer-centric analysis, our results offer a first step to close the gap between computational optimization and asymptotic analysis of coupled nonconvex nonsmooth statistical estimation problems, expanding the former with statistical properties of the practically obtained solution and providing the latter with a more practical focus pertaining to computational tractability.
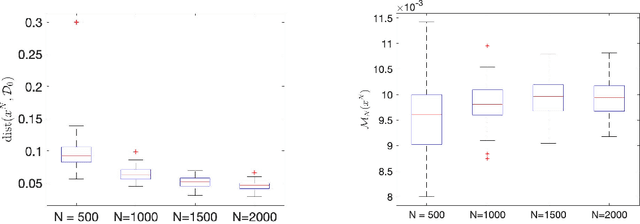
Estimation of Individualized Decision Rules Based on an Optimized Covariate-Dependent Equivalent of Random Outcomes
Aug 27, 2019
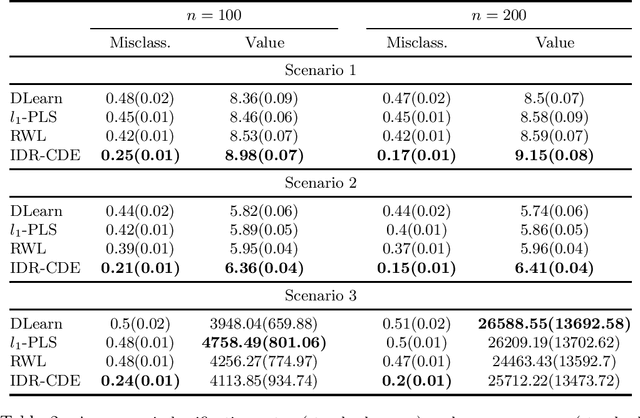
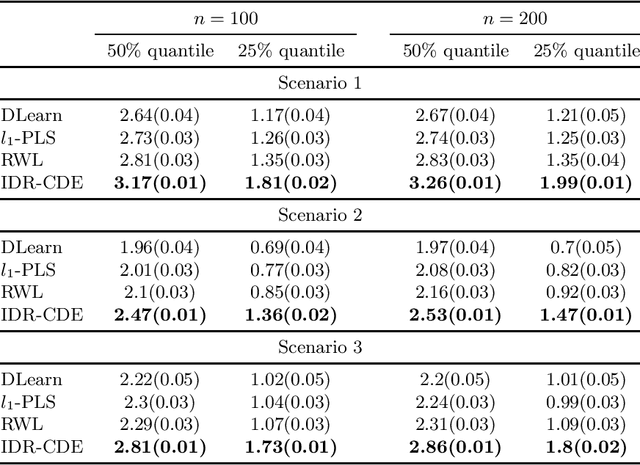
Recent exploration of optimal individualized decision rules (IDRs) for patients in precision medicine has attracted a lot of attention due to the heterogeneous responses of patients to different treatments. In the existing literature of precision medicine, an optimal IDR is defined as a decision function mapping from the patients' covariate space into the treatment space that maximizes the expected outcome of each individual. Motivated by the concept of Optimized Certainty Equivalent (OCE) introduced originally in \cite{ben1986expected} that includes the popular conditional-value-of risk (CVaR) \cite{rockafellar2000optimization}, we propose a decision-rule based optimized covariates dependent equivalent (CDE) for individualized decision making problems. Our proposed IDR-CDE broadens the existing expected-mean outcome framework in precision medicine and enriches the previous concept of the OCE. Numerical experiments demonstrate that our overall approach outperforms existing methods in estimating optimal IDRs under heavy-tail distributions of the data.