 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Rational Illusion: Behaviorally Realistic Strategic Classification
May 19, 2026Strategic classification(SC) studies the interaction between decision models and agents who strategically manipulate their features for favorable outcomes. Existing SC frameworks typically rely on the idealized assumption that agents are strictly rational. However, evidence from behavioral economics and psychology consistently shows that real-world decision-making is often shaped by cognitive biases, deviating from pure rationality. To formalize this limitation, we identify and define a new problem setting, termed the behaviorally realistic strategic classification problem, where agents' strategic manipulations deviate from full rationality due to psychological biases. Motivated by the identified limitation, we propose the Prospect-Guided Strategic Framework (Pro-SF) to address the problem, a principled framework grounded in prospect theory to model and learn under behaviorally realistic strategic responses. Specifically, to capture behaviorally realistic strategic manipulations, our framework reformulates the Stackelberg-style interaction between agents and the decision-maker by incorporating three key mechanisms inspired by prospect theory, including the asymmetry between benefits and costs, different subjective reference points, and non-rational probability distortion. Experiments on synthetic and real-world datasets establish Pro-SF as a behaviorally grounded approach to strategic classification, bridging machine learning and behavioral economics for more reliable deployment in the real world.
When Tabular Foundation Models Meet Strategic Tabular Data: A Prior Alignment Approach
May 19, 2026Tabular foundation models based on pretrained prior-data fitted networks~(PFNs) have shown strong generalization on diverse tabular tasks, but they are typically designed for \emph{non-strategic} settings where data distributions are independent of deployed classifiers. In many real-world decision scenarios, however, individuals may strategically modify their features after deployment to obtain favorable outcomes, inducing a post-deployment distribution shift. This paper studies whether PFN-style tabular foundation models can generalize to such \emph{strategic} tabular data. We show that strategic manipulation creates a mismatch between the non-strategic prior learned during pretraining and the post-manipulation strategic prior, which leads to systematic prediction bias. To address this issue, we propose \textbf{Strategic Prior-data Fitted Network}~\textit{(SPN)}, an inference-time strategy-aware framework that adapts tabular foundation models to strategic environments without retraining. SPN constructs strategic in-context examples to approximate post-manipulation inputs and aligns PFN predictions with the induced strategic distribution. Experiments on real-world and synthetic tabular datasets show that SPN consistently improves robustness and predictive performance under strategic manipulation compared with both tabular foundation models and classical tabular methods.
Detecting Unobserved Confounders: A Kernelized Regression Approach
Jan 01, 2026Detecting unobserved confounders is crucial for reliable causal inference in observational studies. Existing methods require either linearity assumptions or multiple heterogeneous environments, limiting applicability to nonlinear single-environment settings. To bridge this gap, we propose Kernel Regression Confounder Detection (KRCD), a novel method for detecting unobserved confounding in nonlinear observational data under single-environment conditions. KRCD leverages reproducing kernel Hilbert spaces to model complex dependencies. By comparing standard and higherorder kernel regressions, we derive a test statistic whose significant deviation from zero indicates unobserved confounding. Theoretically, we prove two key results: First, in infinite samples, regression coefficients coincide if and only if no unobserved confounders exist. Second, finite-sample differences converge to zero-mean Gaussian distributions with tractable variance. Extensive experiments on synthetic benchmarks and the Twins dataset demonstrate that KRCD not only outperforms existing baselines but also achieves superior computational efficiency.
PerchMobi^3: A Multi-Modal Robot with Power-Reuse Quad-Fan Mechanism for Air-Ground-Wall Locomotion
Sep 16, 2025Achieving seamless integration of aerial flight, ground driving, and wall climbing within a single robotic platform remains a major challenge, as existing designs often rely on additional adhesion actuators that increase complexity, reduce efficiency, and compromise reliability. To address these limitations, we present PerchMobi^3, a quad-fan, negative-pressure, air-ground-wall robot that implements a propulsion-adhesion power-reuse mechanism. By repurposing four ducted fans to simultaneously provide aerial thrust and negative-pressure adhesion, and integrating them with four actively driven wheels, PerchMobi^3 eliminates dedicated pumps while maintaining a lightweight and compact design. To the best of our knowledge, this is the first quad-fan prototype to demonstrate functional power reuse for multi-modal locomotion. A modeling and control framework enables coordinated operation across ground, wall, and aerial domains with fan-assisted transitions. The feasibility of the design is validated through a comprehensive set of experiments covering ground driving, payload-assisted wall climbing, aerial flight, and cross-mode transitions, demonstrating robust adaptability across locomotion scenarios. These results highlight the potential of PerchMobi^3 as a novel design paradigm for multi-modal robotic mobility, paving the way for future extensions toward autonomous and application-oriented deployment.
APT-MMF: An advanced persistent threat actor attribution method based on multimodal and multilevel feature fusion
Feb 20, 2024
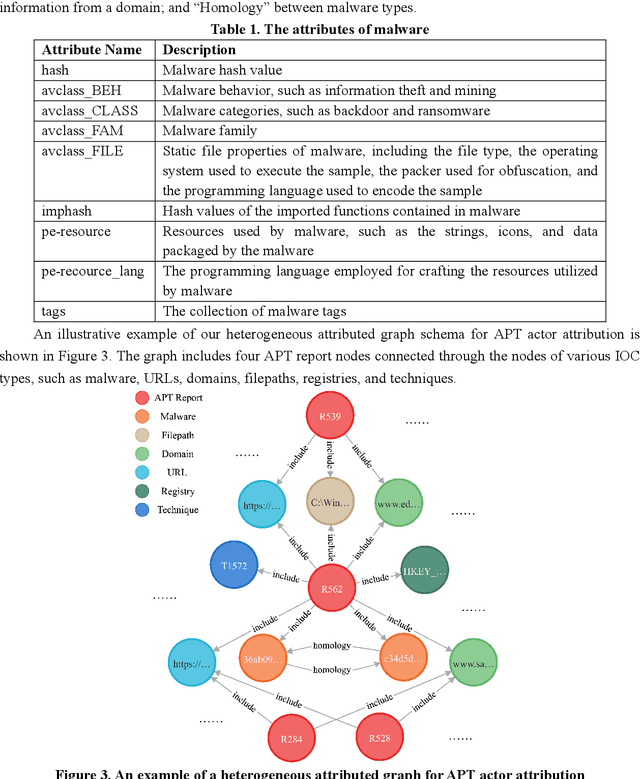


Threat actor attribution is a crucial defense strategy for combating advanced persistent threats (APTs). Cyber threat intelligence (CTI), which involves analyzing multisource heterogeneous data from APTs, plays an important role in APT actor attribution. The current attribution methods extract features from different CTI perspectives and employ machine learning models to classify CTI reports according to their threat actors. However, these methods usually extract only one kind of feature and ignore heterogeneous information, especially the attributes and relations of indicators of compromise (IOCs), which form the core of CTI. To address these problems, we propose an APT actor attribution method based on multimodal and multilevel feature fusion (APT-MMF). First, we leverage a heterogeneous attributed graph to characterize APT reports and their IOC information. Then, we extract and fuse multimodal features, including attribute type features, natural language text features and topological relationship features, to construct comprehensive node representations. Furthermore, we design multilevel heterogeneous graph attention networks to learn the deep hidden features of APT report nodes; these networks integrate IOC type-level, metapath-based neighbor node-level, and metapath semantic-level attention. Utilizing multisource threat intelligence, we construct a heterogeneous attributed graph dataset for verification purposes. The experimental results show that our method not only outperforms the existing methods but also demonstrates its good interpretability for attribution analysis tasks.