 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron 3 Nano Omni: Efficient and Open Multimodal Intelligence
Apr 27, 2026We introduce Nemotron 3 Nano Omni, the latest model in the Nemotron multimodal series and the first to natively support audio inputs alongside text, images, and video. Nemotron 3 Nano Omni delivers consistent accuracy improvements over its predecessor, Nemotron Nano V2 VL, across all modalities, enabled by advances in architecture, training data and recipes. In particular, Nemotron 3 delivers leading results in real-world document understanding, long audio-video comprehension, and agentic computer use. Built on the highly efficient Nemotron 3 Nano 30B-A3B backbone, Nemotron 3 Nano Omni further incorporates innovative multimodal token-reduction techniques to deliver substantially lower inference latency and higher throughput than other models of similar size. We are releasing model checkpoints in BF16, FP8, and FP4 formats, along with portions of the training data and codebase to facilitate further research and development.
Nemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
Dreamweaver: Learning Compositional World Representations from Pixels
Jan 24, 2025



Humans have an innate ability to decompose their perceptions of the world into objects and their attributes, such as colors, shapes, and movement patterns. This cognitive process enables us to imagine novel futures by recombining familiar concepts. However, replicating this ability in artificial intelligence systems has proven challenging, particularly when it comes to modeling videos into compositional concepts and generating unseen, recomposed futures without relying on auxiliary data, such as text, masks, or bounding boxes. In this paper, we propose Dreamweaver, a neural architecture designed to discover hierarchical and compositional representations from raw videos and generate compositional future simulations. Our approach leverages a novel Recurrent Block-Slot Unit (RBSU) to decompose videos into their constituent objects and attributes. In addition, Dreamweaver uses a multi-future-frame prediction objective to capture disentangled representations for dynamic concepts more effectively as well as static concepts. In experiments, we demonstrate our model outperforms current state-of-the-art baselines for world modeling when evaluated under the DCI framework across multiple datasets. Furthermore, we show how the modularized concept representations of our model enable compositional imagination, allowing the generation of novel videos by recombining attributes from different objects.
Structured World Modeling via Semantic Vector Quantization
Feb 02, 2024



Neural discrete representations are crucial components of modern neural networks. However, their main limitation is that the primary strategies such as VQ-VAE can only provide representations at the patch level. Therefore, one of the main goals of representation learning, acquiring structured, semantic, and compositional abstractions such as the color and shape of an object, remains elusive. In this paper, we present the first approach to semantic neural discrete representation learning. The proposed model, called Semantic Vector-Quantized Variational Autoencoder (SVQ), leverages recent advances in unsupervised object-centric learning to address this limitation. Specifically, we observe that a simple approach quantizing at the object level poses a significant challenge and propose constructing scene representations hierarchically, from low-level discrete concept schemas to object representations. Additionally, we suggest a novel method for structured semantic world modeling by training a prior over these representations, enabling the ability to generate images by sampling the semantic properties of the objects in the scene. In experiments on various 2D and 3D object-centric datasets, we find that our model achieves superior generation performance compared to non-semantic vector quantization methods such as VQ-VAE and previous object-centric generative models. Furthermore, we find that the semantic discrete representations can solve downstream scene understanding tasks that require reasoning about the properties of different objects in the scene.
An Investigation into Pre-Training Object-Centric Representations for Reinforcement Learning
Feb 09, 2023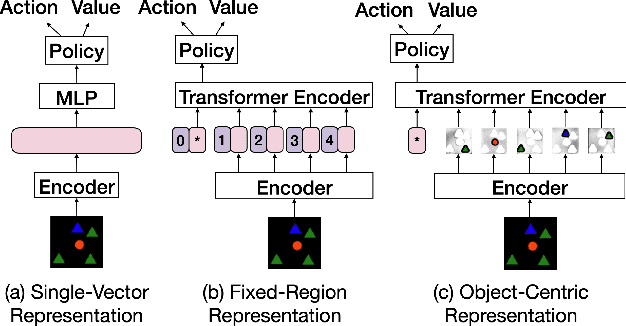
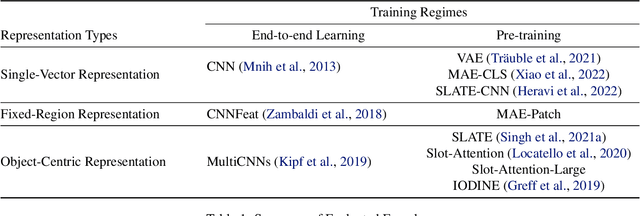
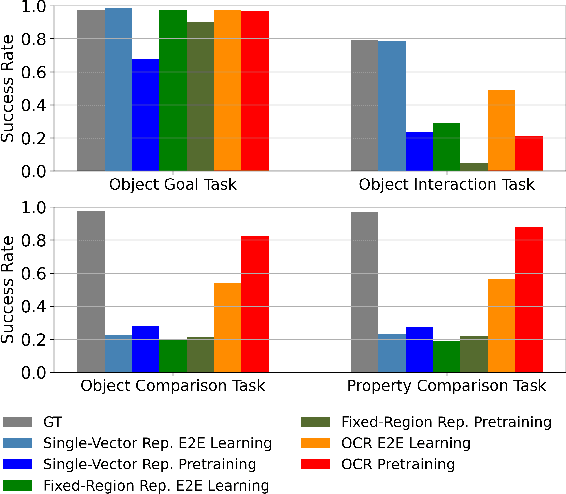
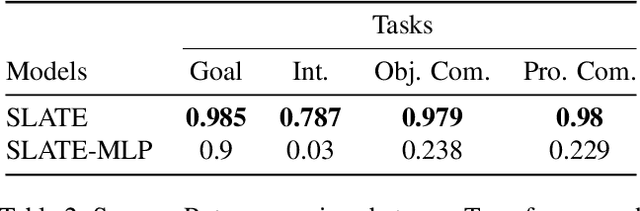
Unsupervised object-centric representation (OCR) learning has recently drawn attention as a new paradigm of visual representation. This is because of its potential of being an effective pre-training technique for various downstream tasks in terms of sample efficiency, systematic generalization, and reasoning. Although image-based reinforcement learning (RL) is one of the most important and thus frequently mentioned such downstream tasks, the benefit in RL has surprisingly not been investigated systematically thus far. Instead, most of the evaluations have focused on rather indirect metrics such as segmentation quality and object property prediction accuracy. In this paper, we investigate the effectiveness of OCR pre-training for image-based reinforcement learning via empirical experiments. For systematic evaluation, we introduce a simple object-centric visual RL benchmark and conduct experiments to answer questions such as ``Does OCR pre-training improve performance on object-centric tasks?'' and ``Can OCR pre-training help with out-of-distribution generalization?''. Our results provide empirical evidence for valuable insights into the effectiveness of OCR pre-training for RL and the potential limitations of its use in certain scenarios. Additionally, this study also examines the critical aspects of incorporating OCR pre-training in RL, including performance in a visually complex environment and the appropriate pooling layer to aggregate the object representations.
Simple Unsupervised Object-Centric Learning for Complex and Naturalistic Videos
May 27, 2022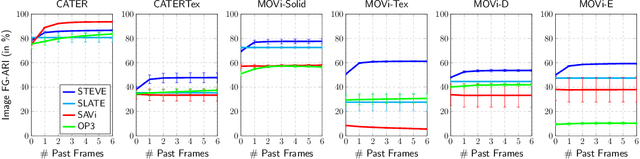
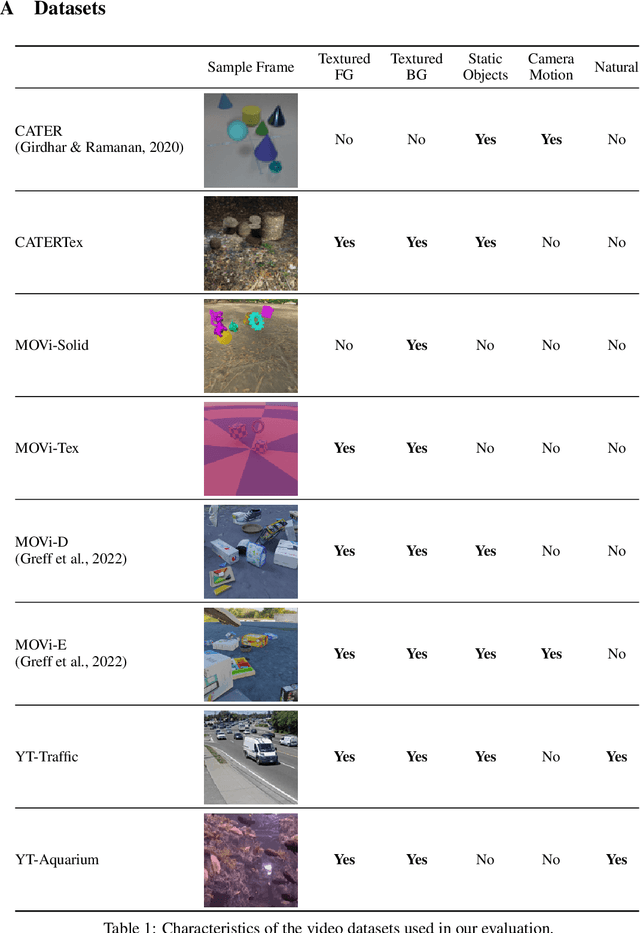
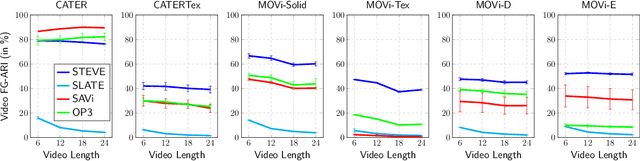
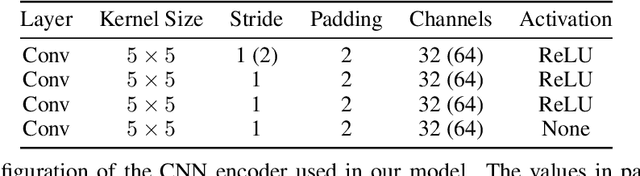
Unsupervised object-centric learning aims to represent the modular, compositional, and causal structure of a scene as a set of object representations and thereby promises to resolve many critical limitations of traditional single-vector representations such as poor systematic generalization. Although there have been many remarkable advances in recent years, one of the most critical problems in this direction has been that previous methods work only with simple and synthetic scenes but not with complex and naturalistic images or videos. In this paper, we propose STEVE, an unsupervised model for object-centric learning in videos. Our proposed model makes a significant advancement by demonstrating its effectiveness on various complex and naturalistic videos unprecedented in this line of research. Interestingly, this is achieved by neither adding complexity to the model architecture nor introducing a new objective or weak supervision. Rather, it is achieved by a surprisingly simple architecture that uses a transformer-based image decoder conditioned on slots and the learning objective is simply to reconstruct the observation. Our experiment results on various complex and naturalistic videos show significant improvements compared to the previous state-of-the-art.
TransDreamer: Reinforcement Learning with Transformer World Models
Feb 19, 2022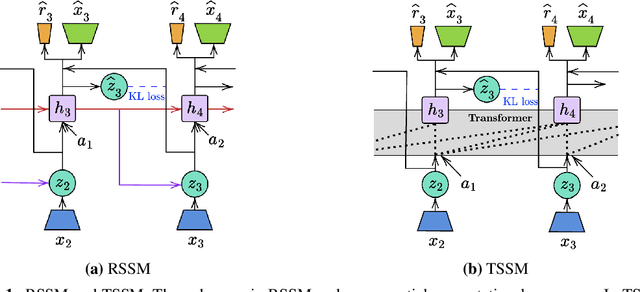
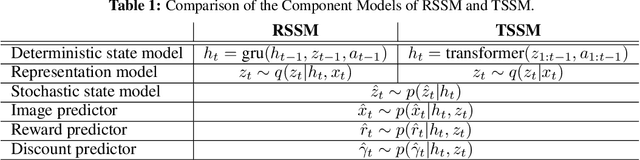
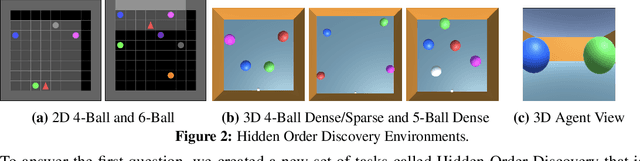
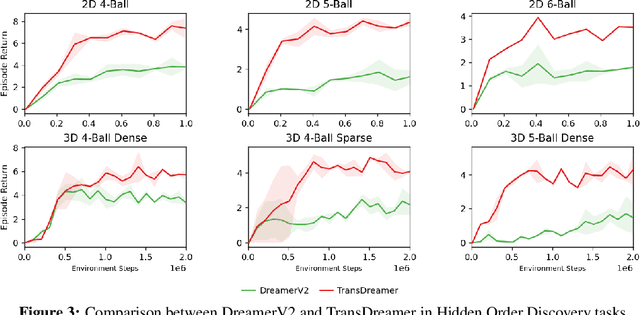
The Dreamer agent provides various benefits of Model-Based Reinforcement Learning (MBRL) such as sample efficiency, reusable knowledge, and safe planning. However, its world model and policy networks inherit the limitations of recurrent neural networks and thus an important question is how an MBRL framework can benefit from the recent advances of transformers and what the challenges are in doing so. In this paper, we propose a transformer-based MBRL agent, called TransDreamer. We first introduce the Transformer State-Space Model, a world model that leverages a transformer for dynamics predictions. We then share this world model with a transformer-based policy network and obtain stability in training a transformer-based RL agent. In experiments, we apply the proposed model to 2D visual RL and 3D first-person visual RL tasks both requiring long-range memory access for memory-based reasoning. We show that the proposed model outperforms Dreamer in these complex tasks.
Generative Video Transformer: Can Objects be the Words?
Jul 20, 2021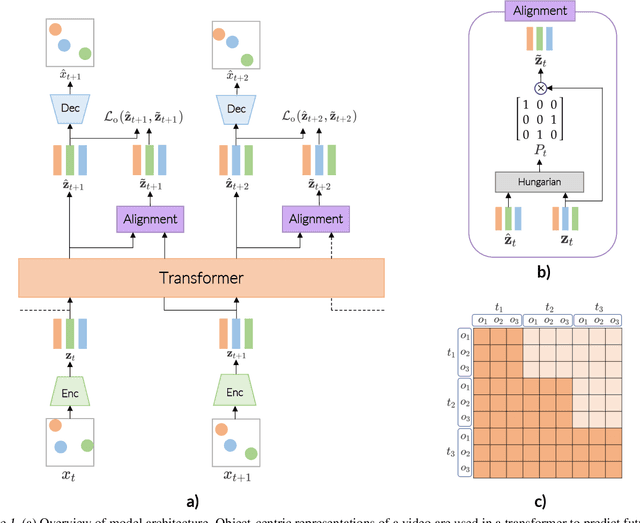
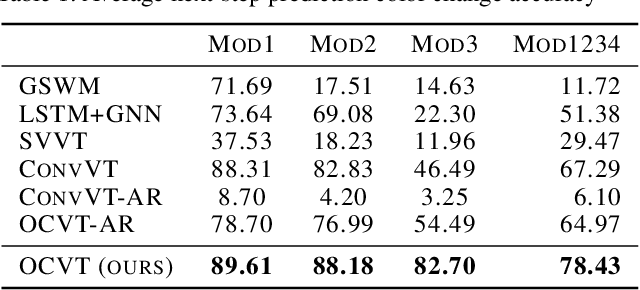
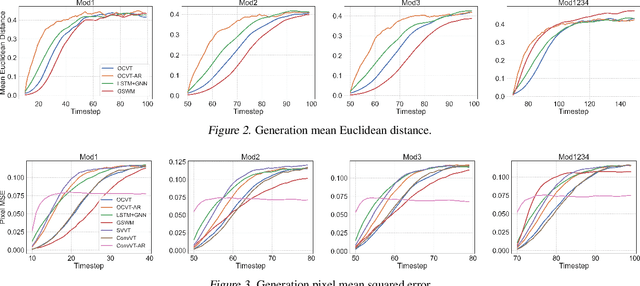
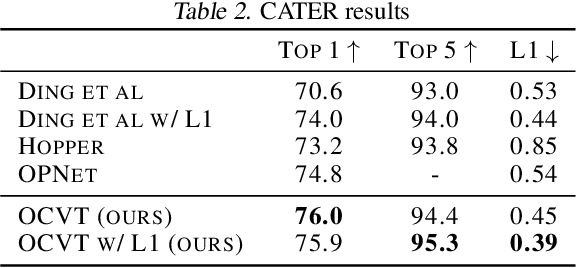
Transformers have been successful for many natural language processing tasks. However, applying transformers to the video domain for tasks such as long-term video generation and scene understanding has remained elusive due to the high computational complexity and the lack of natural tokenization. In this paper, we propose the Object-Centric Video Transformer (OCVT) which utilizes an object-centric approach for decomposing scenes into tokens suitable for use in a generative video transformer. By factoring the video into objects, our fully unsupervised model is able to learn complex spatio-temporal dynamics of multiple interacting objects in a scene and generate future frames of the video. Our model is also significantly more memory-efficient than pixel-based models and thus able to train on videos of length up to 70 frames with a single 48GB GPU. We compare our model with previous RNN-based approaches as well as other possible video transformer baselines. We demonstrate OCVT performs well when compared to baselines in generating future frames. OCVT also develops useful representations for video reasoning, achieving start-of-the-art performance on the CATER task.