 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-Centric Stream Sensing for Grant-Free Access: Deep Learning with Covariance Differencing
Jan 14, 2026Grant-free (GF) access is essential for massive connectivity but faces collision risks due to uncoordinated transmissions. While user-side sensing can mitigate these collisions by enabling autonomous transmission decisions, conventional methods become ineffective in overloaded scenarios where active streams exceed receive antennas. To address this problem, we propose a differential stream sensing framework that reframes the problem from estimating the total stream count to isolating newly activated streams via covariance differencing. We analyze the covariance deviation induced by channel variations to establish a theoretical bound based on channel correlation for determining the sensing window size. To mitigate residual interference from finite sampling, a deep learning (DL) classifier is integrated. Simulations across both independent and identically distributed flat Rayleigh fading and standardized channel environments demonstrate that the proposed method consistently outperforms non-DL baselines and remains robust in overloaded scenarios.
Joint Spectrum Sensing and Resource Allocation for OFDMA-based Underwater Acoustic Communications
Jun 16, 2025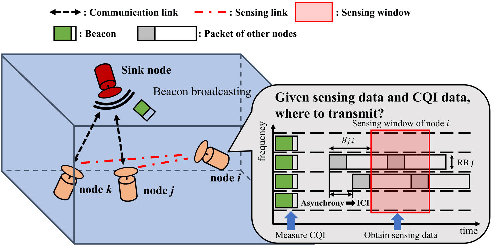
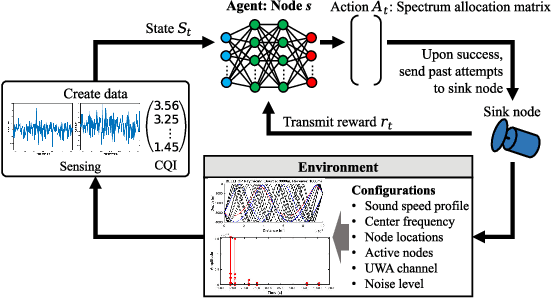
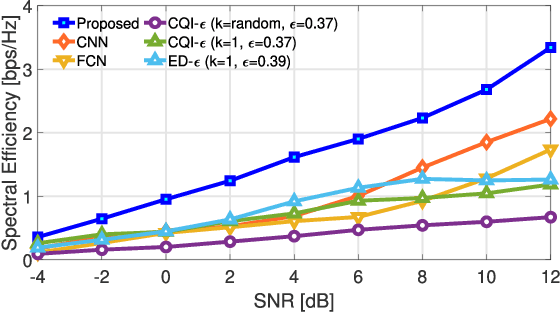
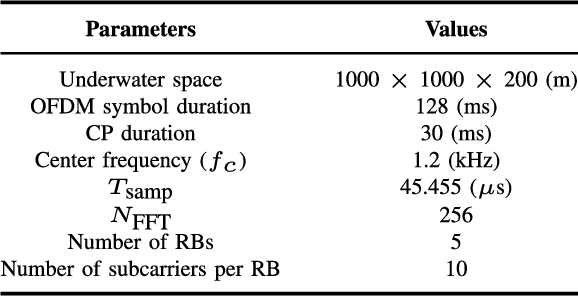
Underwater acoustic (UWA) communications generally rely on cognitive radio (CR)-based ad-hoc networks due to challenges such as long propagation delay, limited channel resources, and high attenuation. To address the constraints of limited frequency resources, UWA communications have recently incorporated orthogonal frequency division multiple access (OFDMA), significantly enhancing spectral efficiency (SE) through multiplexing gains. Still, {the} low propagation speed of UWA signals, combined with {the} dynamic underwater environment, creates asynchrony in multiple access scenarios. This causes inaccurate spectrum sensing as inter-carrier interference (ICI) increases, which leads to difficulties in resource allocation. As efficient resource allocation is essential for achieving high-quality communication in OFDMA-based CR networks, these challenges degrade communication reliability in UWA systems. To resolve the issue, we propose an end-to-end sensing and resource optimization method using deep reinforcement learning (DRL) in an OFDMA-based UWA-CR network. Through extensive simulations, we confirm that the proposed method is superior to baseline schemes, outperforming other methods by 42.9 % in SE and 4.4 % in communication success rate.
Privacy-Protection Drone Patrol System based on Face Anonymization
May 29, 2020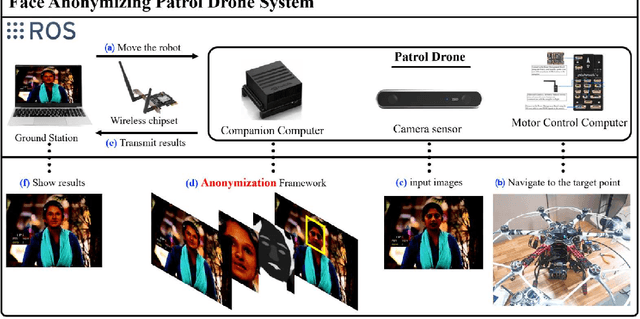
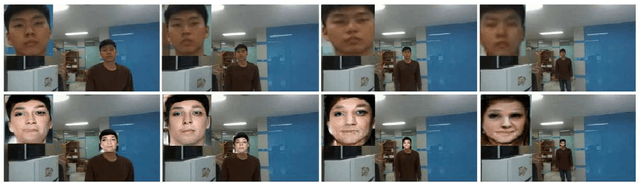
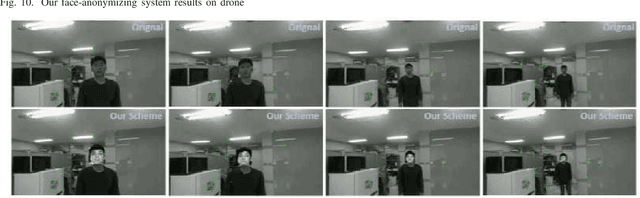
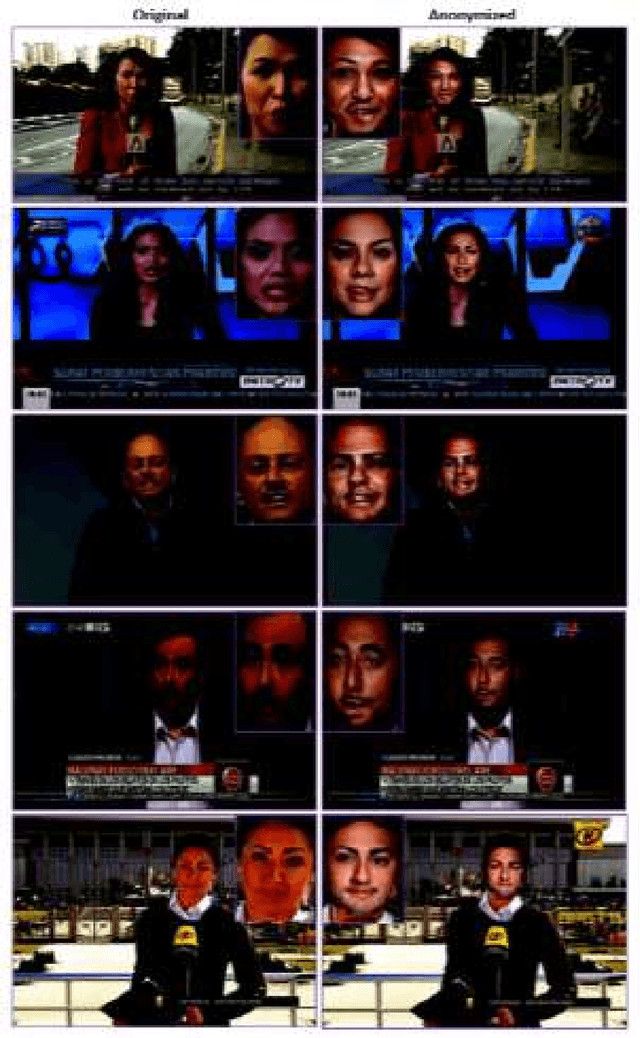
The robot market has been growing significantly and is expected to become 1.5 times larger in 2024 than what it was in 2019. Robots have attracted attention of security companies thanks to their mobility. These days, for security robots, unmanned aerial vehicles (UAVs) have quickly emerged by highlighting their advantage: they can even go to any hazardous place that humans cannot access. For UAVs, Drone has been a representative model and has several merits to consist of various sensors such as high-resolution cameras. Therefore, Drone is the most suitable as a mobile surveillance robot. These attractive advantages such as high-resolution cameras and mobility can be a double-edged sword, i.e., privacy infringement. Surveillance drones take videos with high-resolution to fulfill their role, however, those contain a lot of privacy sensitive information. The indiscriminate shooting is a critical issue for those who are very reluctant to be exposed. To tackle the privacy infringement, this work proposes face-anonymizing drone patrol system. In this system, one person's face in a video is transformed into a different face with facial components maintained. To construct our privacy-preserving system, we have adopted the latest generative adversarial networks frameworks and have some modifications on losses of those frameworks. Our face-anonymzing approach is evaluated with various public face-image and video dataset. Moreover, our system is evaluated with a customized drone consisting of a high-resolution camera, a companion computer, and a drone control computer. Finally, we confirm that our system can protect privacy sensitive information with our face-anonymzing algorithm while preserving the performance of robot perception, i.e., simultaneous localization and mapping.