 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMudiNet: Task-guided Disentangled Representation Learning for 5G Indoor Multipath-assisted Positioning
Jun 04, 2025In the fifth-generation communication system (5G), multipath-assisted positioning (MAP) has emerged as a promising approach. With the enhancement of signal resolution, multipath component (MPC) are no longer regarded as noise but rather as valuable information that can contribute to positioning. However, existing research often treats reflective surfaces as ideal reflectors, while being powerless in the face of indistinguishable multipath caused by diffuse reflectors. This study approaches diffuse reflectors from the perspective of uncertainty, investigating the statistical distribution characteristics of indoor diffuse and specular reflectors. Based on these insights, a task-guided disentangled representation learning method leveraging multi-time channel impulse response (CIR) observations is designed to directly map CIRs to positions, while mitigating the adverse effects of components that contribute minimally to localization accuracy (e.g., diffuse multipath).In this semi-supervised learning framework, a global feature extraction architecture based on self-attention is proposed to capture location-independent wireless environmental information, while an MLP is employed to extract the time-varying features related to user equipment (UE) positions. Variational inference based on a latent variable model (LVM) is applied to separate independent features within the CIR, with position labels guiding the LVM to express components more beneficial for localization. Additionally, we provide a feasibility proof for the separability of diffuse and specular environmental features in CIRs. Simulation results demonstrate that the proposed method achieves higher localization accuracy compared to conventional search-based localization methods, with enhanced robustness against indistinguishable multipath from diffuse reflectors.
Intrinsic Cramér-Rao Bound based 6D Localization and Tracking for 5G/6G Systems
Feb 19, 2025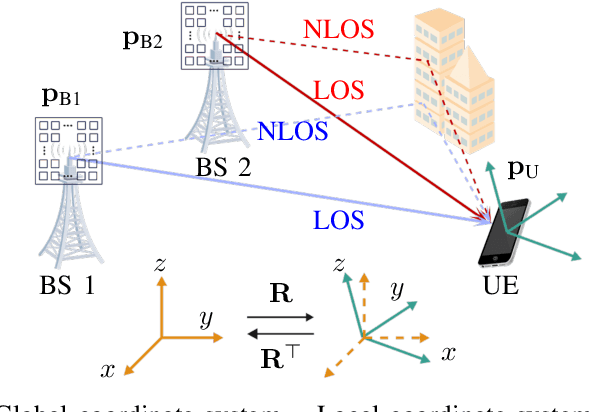
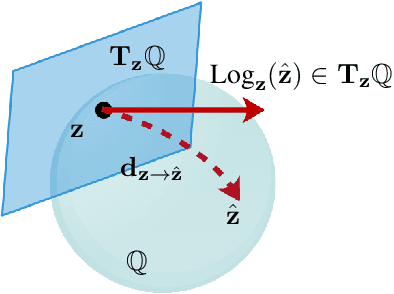
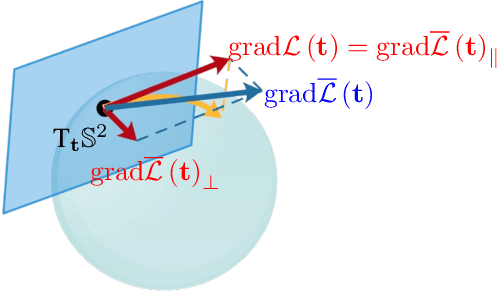
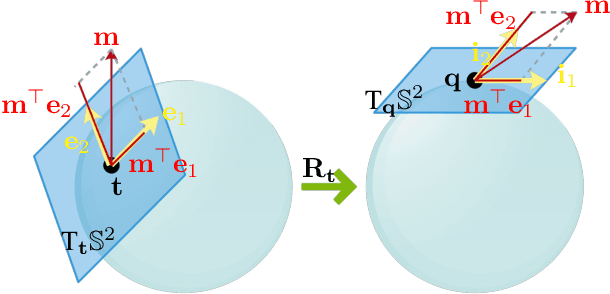
Localization and tracking are critical components of integrated sensing and communication (ISAC) systems, enhancing resource management, beamforming accuracy, and overall system reliability through precise sensing. Due to the high path loss of the high-frequency systems, antenna arrays are required at the transmitter and receiver sides for beamforming gain. However, beam misalignment may occur, which requires accurate tracking of the six-dimensional (6D) state, namely, 3D position and 3D orientation. In this work, we first address the challenge that the rotation matrix, being part of the Lie group rather than Euclidean space, necessitates the derivation of the ICRB for an intrinsic performance benchmark. Then, leveraging the derived ICRB, we develop two filters-one utilizing pose fusion and the other employing error-state Kalman filter to estimate the UE's 6D state for different computational resource consumption and accuracy requirements. Simulation results validate the ICRB and assess the performance of the proposed filters, demonstrating their effectiveness and improved accuracy in 6D state tracking.