 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Bandwidth and Power Optimization for Multi-Modal Edge Intelligence Autonomous Driving
Oct 18, 2022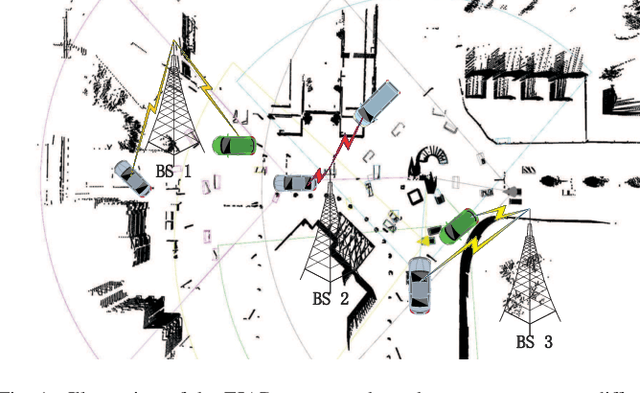
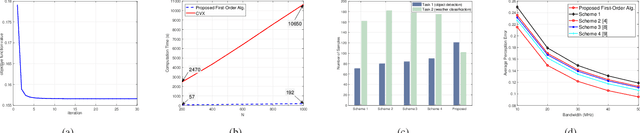
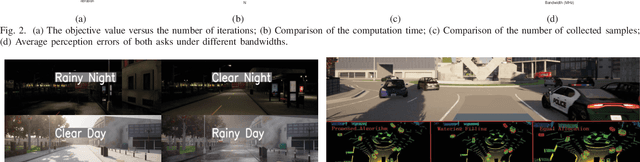
Edge intelligence autonomous driving (EIAD) offers computing resources in autonomous vehicles for training deep neural networks. However, wireless channels between the edge server and autonomous vehicles are time-varying due to the high-mobility of vehicles. Moreover, the required number of training samples for different data modalities (e.g., images, point-clouds) is diverse. Consequently, when collecting these datasets from vehicles to the edge server, the associated bandwidth and power allocation across all data frames is a large-scale multi-modal optimization problem. This article proposes a highly computationally efficient algorithm that directly maximizes the quality of training (QoT). The key ingredients include a data-driven model for quantifying the priority of data modality and two first-order methods termed accelerated gradient projection and dual decomposition for low-complexity resource allocation. High-fidelity simulations in Car Learning to Act (CARLA) show that the proposed algorithm reduces the perception error by $3\%$ and the computation time by $98\%$.