 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Color-Code Net: Real-Time RGB-Based 6D Object Pose Estimation on Edge Devices
Jun 05, 2024



As robotics and augmented reality applications increasingly rely on precise and efficient 6D object pose estimation, real-time performance on edge devices is required for more interactive and responsive systems. Our proposed Sparse Color-Code Net (SCCN) embodies a clear and concise pipeline design to effectively address this requirement. SCCN performs pixel-level predictions on the target object in the RGB image, utilizing the sparsity of essential object geometry features to speed up the Perspective-n-Point (PnP) computation process. Additionally, it introduces a novel pixel-level geometry-based object symmetry representation that seamlessly integrates with the initial pose predictions, effectively addressing symmetric object ambiguities. SCCN notably achieves an estimation rate of 19 frames per second (FPS) and 6 FPS on the benchmark LINEMOD dataset and the Occlusion LINEMOD dataset, respectively, for an NVIDIA Jetson AGX Xavier, while consistently maintaining high estimation accuracy at these rates.
Data-Driven Ergonomic Risk Assessment of Complex Hand-intensive Manufacturing Processes
Mar 05, 2024Hand-intensive manufacturing processes, such as composite layup and textile draping, require significant human dexterity to accommodate task complexity. These strenuous hand motions often lead to musculoskeletal disorders and rehabilitation surgeries. We develop a data-driven ergonomic risk assessment system with a special focus on hand and finger activity to better identify and address ergonomic issues related to hand-intensive manufacturing processes. The system comprises a multi-modal sensor testbed to collect and synchronize operator upper body pose, hand pose and applied forces; a Biometric Assessment of Complete Hand (BACH) formulation to measure high-fidelity hand and finger risks; and industry-standard risk scores associated with upper body posture, RULA, and hand activity, HAL. Our findings demonstrate that BACH captures injurious activity with a higher granularity in comparison to the existing metrics. Machine learning models are also used to automate RULA and HAL scoring, and generalize well to unseen participants. Our assessment system, therefore, provides ergonomic interpretability of the manufacturing processes studied, and could be used to mitigate risks through minor workplace optimization and posture corrections.
Vision-Based Object Recognition in Indoor Environments Using Topologically Persistent Features
Oct 17, 2020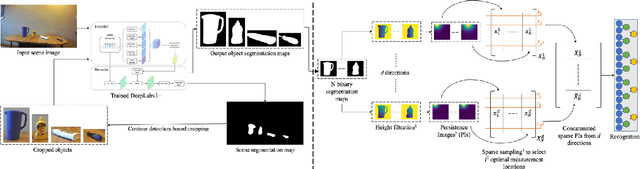
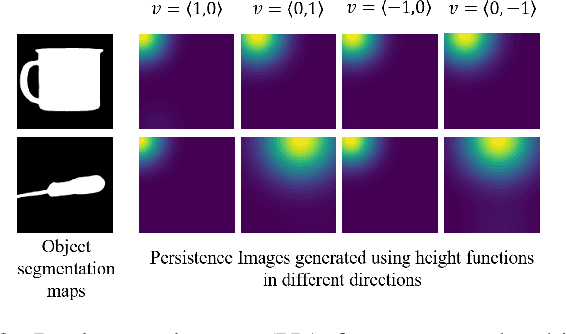
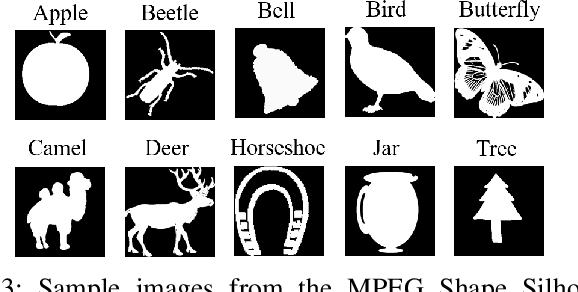
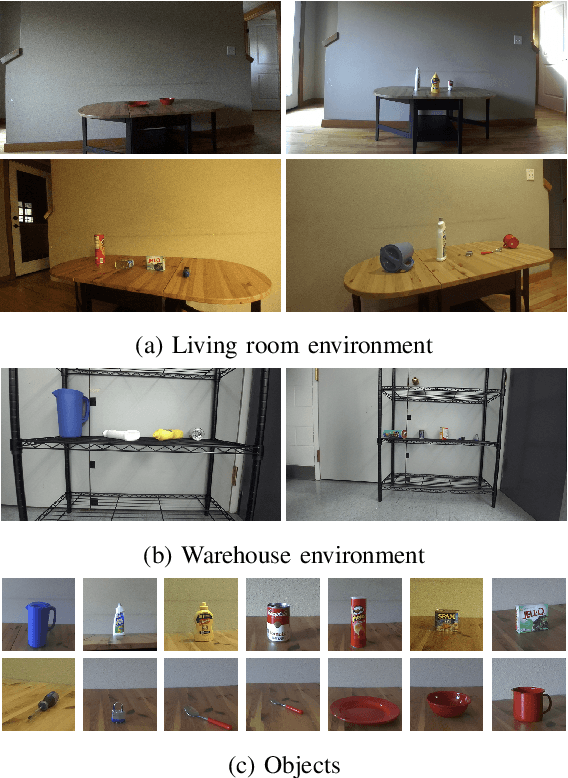
Object recognition in unseen indoor environments remains a challenging problem for visual perception of mobile robots. In this letter, we propose the use of topologically persistent features, which rely on the shape information of the objects, to address this challenge. In particular, we extract two kinds of features, namely, sparse persistence image (PI) and amplitude, by applying persistent homology to multi-directional height function-based filtrations of the cubical complexes representing the object segmentation maps. The features are then used to train a fully connected network for recognition. For performance evaluation, in addition to a widely-used shape dataset, we collect a new dataset comprising scene images from two different environments, namely, a living room and a mock warehouse. The scenes in both the environments include up to five different objects that are chosen from a given set of fourteen objects. The objects have varying poses and arrangements, and are imaged under different illumination conditions and camera poses. The recognition performance of our methods, which are trained using the living room images, remains relatively unaffected on the unseen warehouse images. In contrast, the performance of the state-of-the-art Faster R-CNN method decreases significantly. In fact, the use of sparse PI features yields higher overall recall and accuracy; and, better F1 scores on many of the individual object classes. We also implement the proposed method on a real-world robot to demonstrate its usefulness.
Real-time Data Driven Precision Estimator for RAVEN-II Surgical Robot End Effector Position
Oct 14, 2019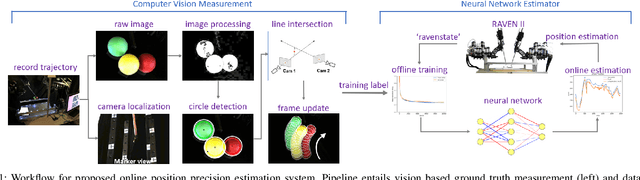
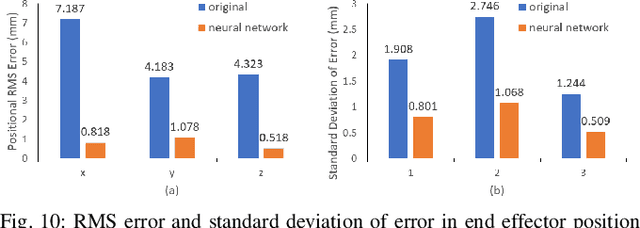
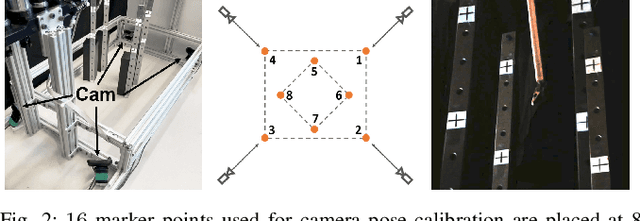
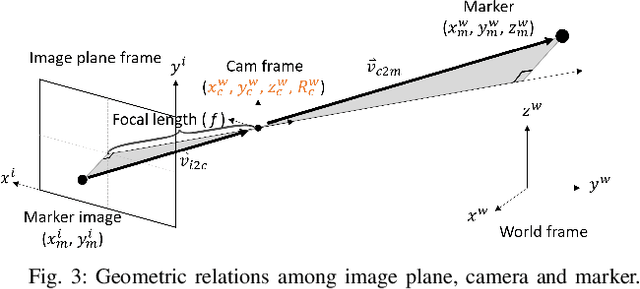
Surgical robots have been introduced to operating rooms over the past few decades due to their high sensitivity, small size, and remote controllability. The cable-driven nature of many surgical robots allows the systems to be dexterous and lightweight, with diameters as low as 5mm. However, due to the slack and stretch of the cables and the backlash of the gears, inevitable uncertainties are brought into the kinematics calculation. Since the reported end effector position of surgical robots like RAVEN-II is directly calculated using the motor encoder measurements and forward kinematics, it may contain relatively large error up to 10mm, whereas semi-autonomous functions being introduced into abdominal surgeries require position inaccuracy of at most 1mm. To resolve the problem, a cost-effective, real-time and data-driven pipeline for robot end effector position precision estimation is proposed and tested on RAVEN-II. Analysis shows an improved end effector position error of around 1mm RMS traversing through the entire robot workspace without high-resolution motion tracker.