 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBudgetDraft: Acceptance-Aware Multi-View Training for Sparse-KV Speculative Decoding
May 29, 2026Speculative decoding speeds up autoregressive decoding by using a drafter to propose multiple tokens that a verifier validates in parallel. In resource-constrained deployments, the drafter uses a sparse KV cache to limit peak GPU memory and end-to-end latency under a fixed KV budget, while the verifier keeps a full KV cache. Mid-to-long context inference (4K--16K context length) is common in real applications. However, naive sparse/full speculative decoding suffers from the sparse/full mismatch as context length grows, causing the acceptance rate to drop quickly. We propose BudgetDraft, a multi-view sparse training method for sparse drafting in mid-to-long inference. The drafter is exposed to multiple sampled KV budgets during training and learns to align each sparse view with one shared full-cache teacher target. BudgetDraft combines an acceptance-aware loss on a full-cache branch with a multi-view loss on a sparse-cache branch, producing a single budget-robust drafter that recovers acceptance across sparsity levels without extra inference-time components. Experimental results on PG-19, LongBench, and LWM show that BudgetDraft achieves up to 6.55x, 4.46x, and 2.10x end-to-end speedup vs AR at 4K, 8K, and 16K context lengths, while keeping the inference pipeline memory-friendly.
ELAS: Efficient Pre-Training of Low-Rank Large Language Models via 2:4 Activation Sparsity
May 05, 2026Large Language Models (LLMs) have achieved remarkable capabilities, but their immense computational demands during training remain a critical bottleneck for widespread adoption. Low-rank training has received attention in recent years due to its ability to significantly reduce training memory usage. Meanwhile, applying 2:4 structured sparsity to weights and activations to leverage NVIDIA GPU support for 2:4 structured sparse format has become a promising direction. However, existing low-rank methods often leave activation matrices in full-rank, which dominates memory consumption and limits throughput during large-batch training. Furthermore, directly applying sparsity to weights often leads to non-negligible performance degradation. To achieve efficient pre-training of LLMs, this paper proposes ELAS: Efficient pre-training of Low-rank LLMs via 2:4 Activation Sparsity, a novel framework for low-rank models via 2:4 activation sparsity. ELAS applies squared ReLU activation functions to the feed-forward networks in low-rank models and implements 2:4 structured sparsity on the activations after the squared ReLU operation. We evaluated ELAS through pre-training experiments on LLaMA models ranging from 60M to 1B parameters. The results demonstrate that ELAS maintains performance with minimal degradation after applying 2:4 activation sparsity, while achieving training and inference acceleration. Moreover, ELAS reduces activation memory overhead, particularly with large batch sizes. Code is available at ELAS Repo.
Self-Supervised Federated Learning under Data Heterogeneity for Label-Scarce Diatom Classification
Mar 31, 2026Label-scarce visual classification under decentralized and heterogeneous data is a fundamental challenge in pattern recognition, especially when sites exhibit partially overlapping class sets. While self-supervised federated learning (SSFL) offers a promising solution, existing studies commonly assume the same data heterogeneity pattern throughout pre-training and fine-tuning. Moreover, current partitioning schemes often fail to generate pure partially class-disjoint data settings, limiting controllable simulation of real-world label-space heterogeneity. In this work, we introduce SSFL for diatom classification as a representative real-world instance and systematically investigate stage-specific data heterogeneity. We study cross-site variation in unlabeled data volume during pre-training and label-space misalignment during downstream fine-tuning. To study the latter in a controllable setting, we propose PreDi, a partitioning scheme that disentangles label-space heterogeneity into two orthogonal dimensions, namely class Prevalence and class-set size Disparity, enabling separate analysis of their effects. Guided by the resulting insights, we further propose PreP-WFL (Prevalence-based Personalized Weighted Federated Learning) to adaptively strengthen rare-class representations in low-prevalence scenarios. Extensive experiments show that SSFL consistently outperforms local-only training under both homogeneous and heterogeneous settings. The pronounced heterogeneity in unlabeled data volume is associated with improved representation pre-training, whereas under label-space heterogeneity, prevalence dominates performance and disparity has a smaller effect. PreP-WFL effectively mitigates this degradation, with gains increasing as prevalence decreases. These findings provide a mechanistic basis for characterizing label-space heterogeneity in decentralized recognition systems.
TSegAgent: Zero-Shot Tooth Segmentation via Geometry-Aware Vision-Language Agents
Mar 20, 2026Automatic tooth segmentation and identification from intra-oral scanned 3D models are fundamental problems in digital dentistry, yet most existing approaches rely on task-specific 3D neural networks trained with densely annotated datasets, resulting in high annotation cost and limited generalization to scans from unseen sources. Thus, we propose TSegAgent, which addresses these challenges by reformulating dental analysis as a zero-shot geometric reasoning problem rather than a purely data-driven recognition task. The key idea is to combine the representational capacity of general-purpose foundation models with explicit geometric inductive biases derived from dental anatomy. Instead of learning dental-specific features, the proposed framework leverages multi-view visual abstraction and geometry-grounded reasoning to infer tooth instances and identities without task-specific training. By explicitly encoding structural constraints such as dental arch organization and volumetric relationships, the method reduces uncertainty in ambiguous cases and mitigates overfitting to particular shape distributions. Experimental results demonstrate that this reasoning-oriented formulation enables accurate and reliable tooth segmentation and identification with low computational and annotation cost, while exhibiting strong generalization across diverse and previously unseen dental scans.
Long Chain-of-Thought Compression via Fine-Grained Group Policy Optimization
Feb 10, 2026Large Language Models (LLMs) often generate unnecessarily verbose Chain-of-Thought (CoT) reasoning that increases computational costs and latency without proportional performance gains. In this paper, we propose \textbf{F}ine-grained \textbf{G}roup policy \textbf{O}ptimization (\textbf{FGO}), a Reinforcement Learning (RL) algorithm that refines group responses by subdividing them and assigning appropriate weights based on length and entropy, thereby enabling effective CoT compression. Meanwhile, as an enhanced variant of Group Relative Policy Optimization (GRPO), FGO successfully addresses two major limitations of the GRPO: inefficient data utilization and entropy collapse. We evaluate FGO on multiple reasoning LLMs and benchmarks, including MATH500, AIME24, AMC23, and Minerva. Experimental results show that FGO achieves efficient CoT compression without degrading performance, and simultaneously resolves the key limitations of GRPO.
OWLed: Outlier-weighed Layerwise Pruning for Efficient Autonomous Driving Framework
Nov 12, 2024



The integration of Large Language Models (LLMs) into autonomous driving systems offers promising enhancements in environmental understanding and decision-making. However, the substantial computational demands of deploying LLMs locally on vehicles render this approach unfeasible for real-world automotive applications. To address this challenge, we introduce OWLed, the Outlier-Weighed Layerwise Pruning for Efficient Autonomous Driving Framework that leverages outlier-weighted layerwise sparsity for model compression. Our method assigns non-uniform sparsity ratios to different layers based on the distribution of outlier features, significantly reducing the model size without the need for fine-tuning. To ensure the compressed model adapts well to autonomous driving tasks, we incorporate driving environment data into both the calibration and pruning processes. Our empirical studies reveal that the encoder component is more sensitive to pruning than the LLM, highlighting its critical role in the system. Experimental results demonstrate that OWLed outperforms existing methods in perception, action prediction, and language understanding while substantially lowering computational requirements. These findings underscore the potential of combining advanced pruning techniques with LLMs to develop efficient and robust autonomous driving systems capable of handling complex scenarios. Code will be made publicly available.
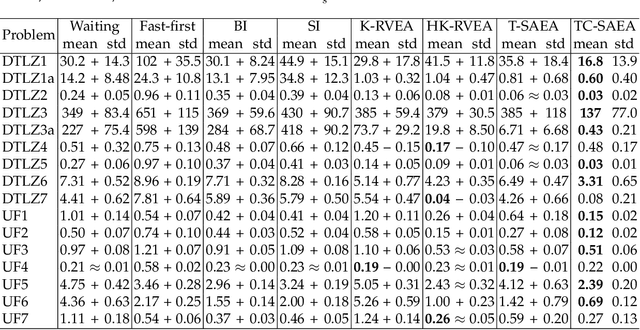
Alleviating Search Bias in Bayesian Evolutionary Optimization with Many Heterogeneous Objectives
Aug 25, 2022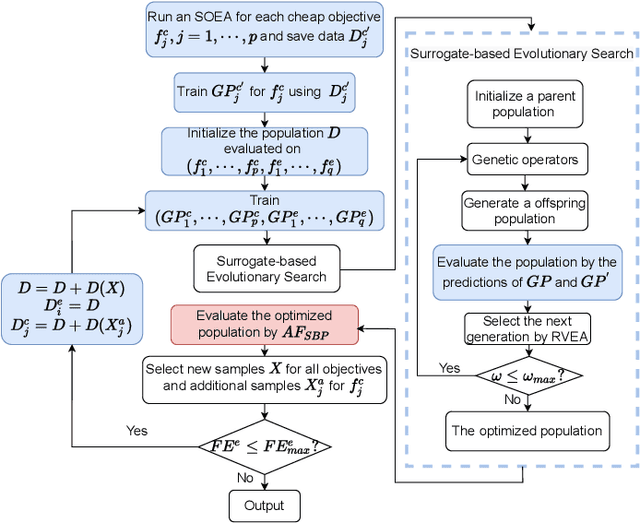
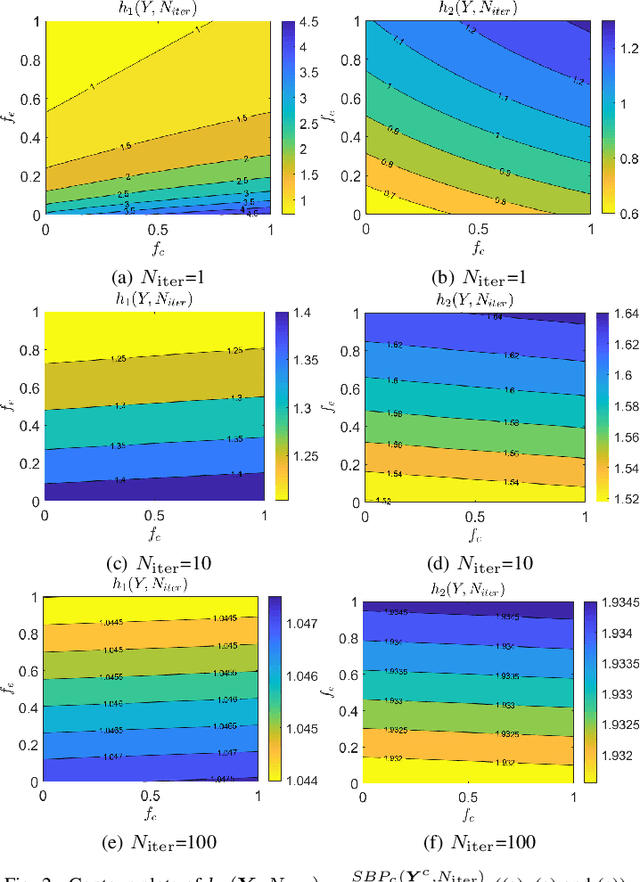
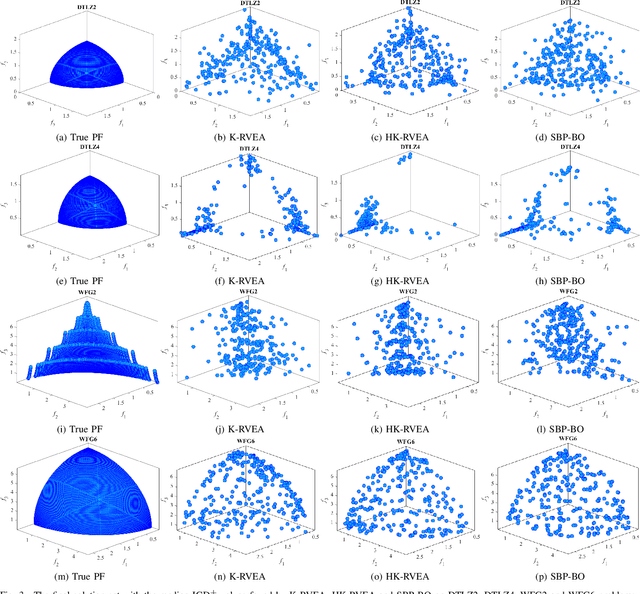
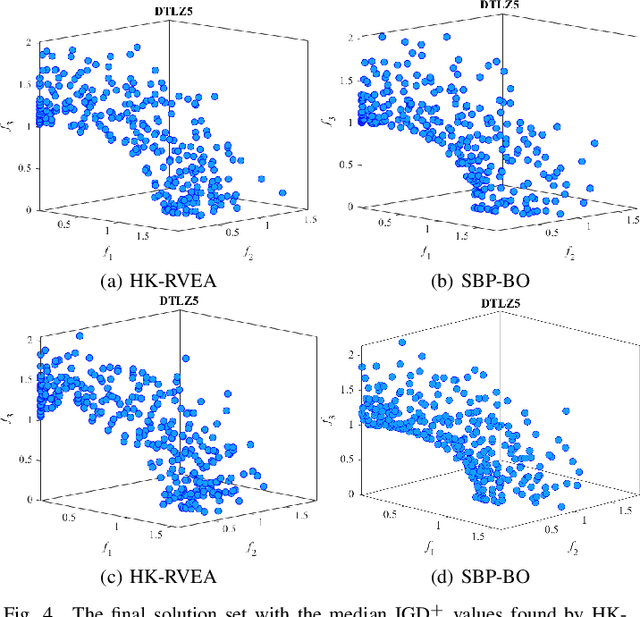
Multi-objective optimization problems whose objectives have different evaluation costs are commonly seen in the real world. Such problems are now known as multi-objective optimization problems with heterogeneous objectives (HE-MOPs). So far, however, only a few studies have been reported to address HE-MOPs, and most of them focus on bi-objective problems with one fast objective and one slow objective. In this work, we aim to deal with HE-MOPs having more than two black-box and heterogeneous objectives. To this end, we develop a multi-objective Bayesian evolutionary optimization approach to HE-MOPs by exploiting the different data sets on the cheap and expensive objectives in HE-MOPs to alleviate the search bias caused by the heterogeneous evaluation costs for evaluating different objectives. To make the best use of two different training data sets, one with solutions evaluated on all objectives and the other with those only evaluated on the fast objectives, two separate Gaussian process models are constructed. In addition, a new acquisition function that mitigates search bias towards the fast objectives is suggested, thereby achieving a balance between convergence and diversity. We demonstrate the effectiveness of the proposed algorithm by testing it on widely used multi-/many-objective benchmark problems whose objectives are assumed to be heterogeneously expensive.
Recent Advances in Bayesian Optimization
Jun 07, 2022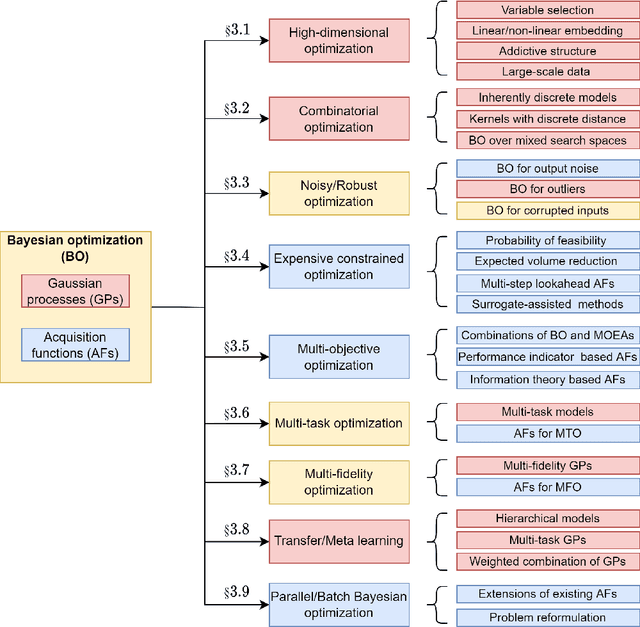
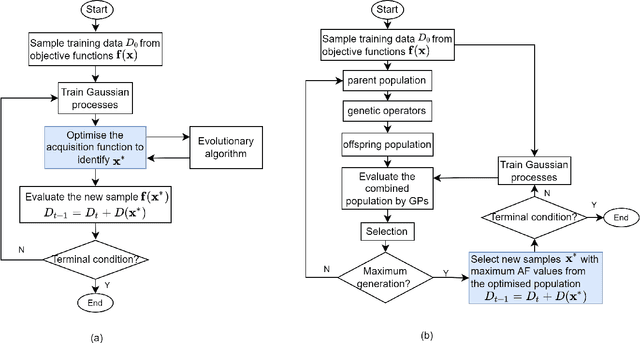
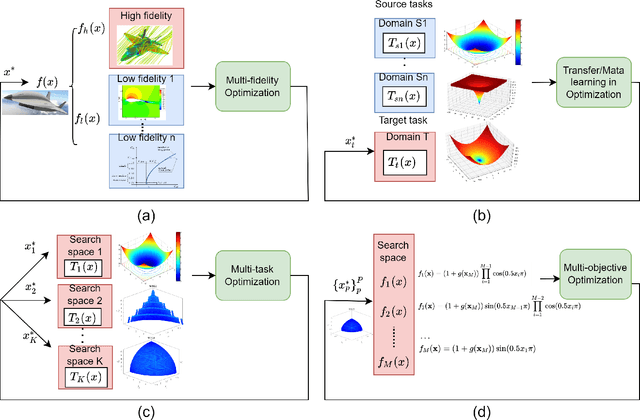
Bayesian optimization has emerged at the forefront of expensive black-box optimization due to its data efficiency. Recent years have witnessed a proliferation of studies on the development of new Bayesian optimization algorithms and their applications. Hence, this paper attempts to provide a comprehensive and updated survey of recent advances in Bayesian optimization and identify interesting open problems. We categorize the existing work on Bayesian optimization into nine main groups according to the motivations and focus of the proposed algorithms. For each category, we present the main advances with respect to the construction of surrogate models and adaptation of the acquisition functions. Finally, we discuss the open questions and suggest promising future research directions, in particular with regard to heterogeneity, privacy preservation, and fairness in distributed and federated optimization systems.
Transfer Learning Based Co-surrogate Assisted Evolutionary Bi-objective Optimization for Objectives with Non-uniform Evaluation Times
Aug 30, 2021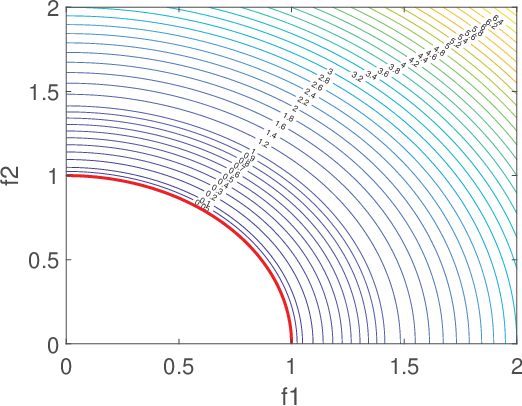
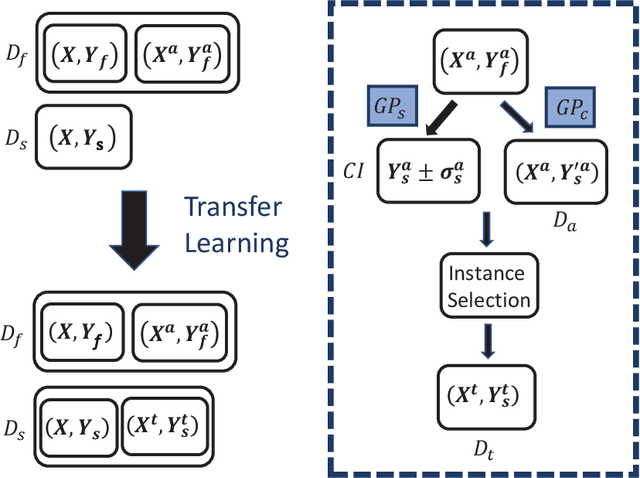
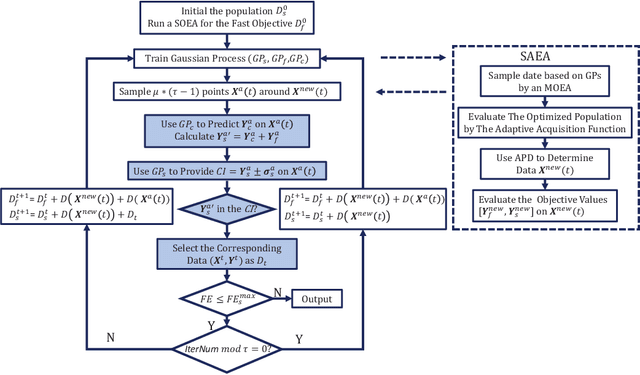
Most existing multiobjetive evolutionary algorithms (MOEAs) implicitly assume that each objective function can be evaluated within the same period of time. Typically. this is untenable in many real-world optimization scenarios where evaluation of different objectives involves different computer simulations or physical experiments with distinct time complexity. To address this issue, a transfer learning scheme based on surrogate-assisted evolutionary algorithms (SAEAs) is proposed, in which a co-surrogate is adopted to model the functional relationship between the fast and slow objective functions and a transferable instance selection method is introduced to acquire useful knowledge from the search process of the fast objective. Our experimental results on DTLZ and UF test suites demonstrate that the proposed algorithm is competitive for solving bi-objective optimization where objectives have non-uniform evaluation times.
Learning pose variations within shape population by constrained mixtures of factor analyzers
Jun 07, 2020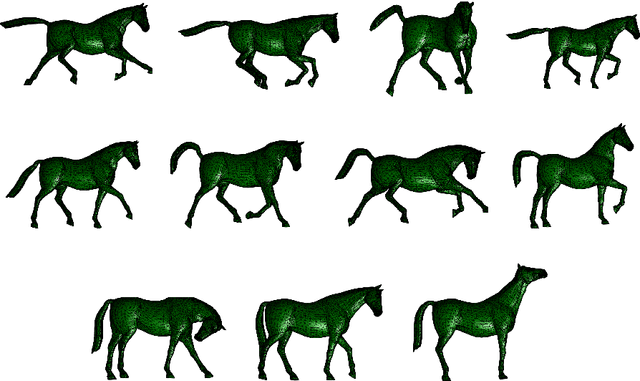
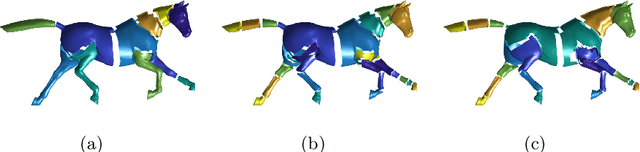
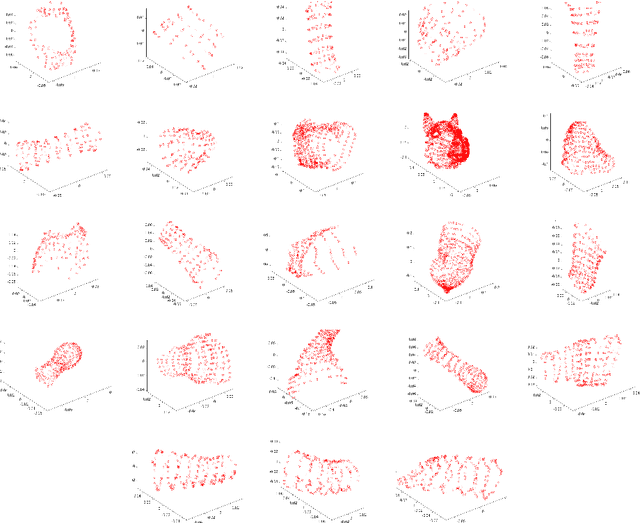
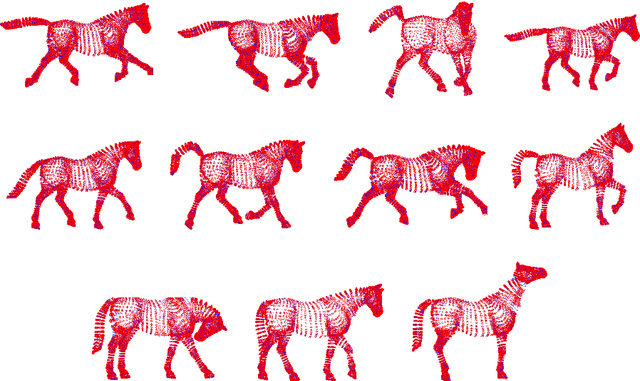
Mining and learning the shape variability of underlying population has benefited the applications including parametric shape modeling, 3D animation, and image segmentation. The current statistical shape modeling method works well on learning unstructured shape variations without obvious pose changes (relative rotations of the body parts). Studying the pose variations within a shape population involves segmenting the shapes into different articulated parts and learning the transformations of the segmented parts. This paper formulates the pose learning problem as mixtures of factor analyzers. The segmentation is obtained by components posterior probabilities and the rotations in pose variations are learned by the factor loading matrices. To guarantee that the factor loading matrices are composed by rotation matrices, constraints are imposed and the corresponding closed form optimal solution is derived. Based on the proposed method, the pose variations are automatically learned from the given shape populations. The method is applied in motion animation where new poses are generated by interpolating the existing poses in the training set. The obtained results are smooth and realistic.