 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWood-leaf classification of tree point cloud based on intensity and geometrical information
Aug 02, 2021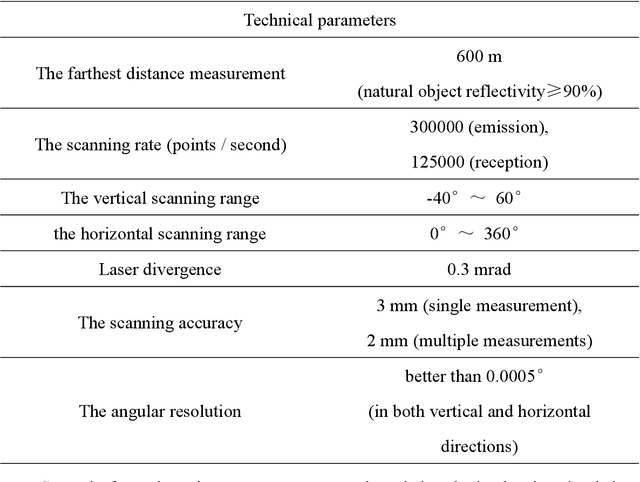
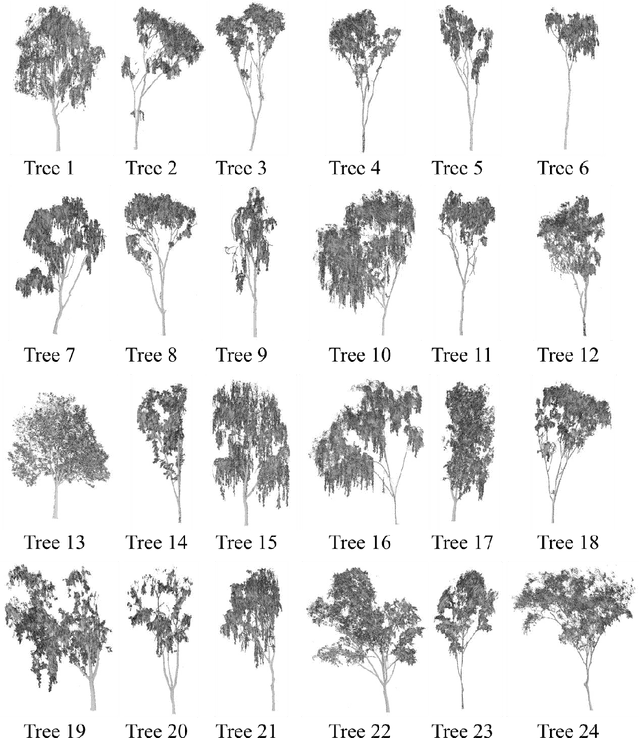
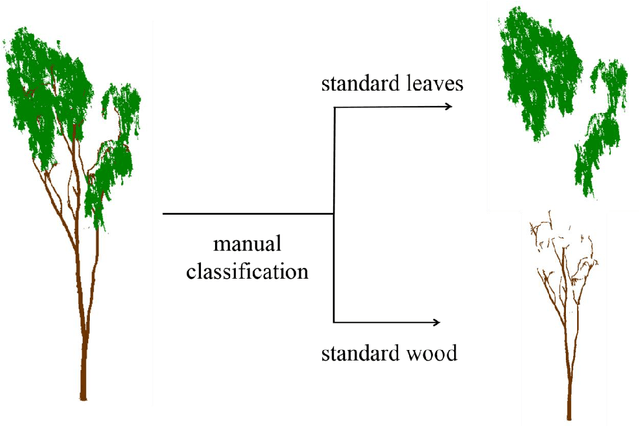
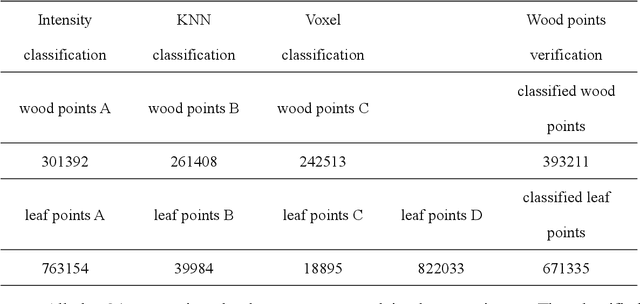
Terrestrial laser scanning (TLS) can obtain tree point cloud with high precision and high density. Efficient classification of wood points and leaf points is essential to study tree structural parameters and ecological characteristics. By using both the intensity and spatial information, a three-step classification and verification method was proposed to achieve automated wood-leaf classification. Tree point cloud was classified into wood points and leaf points by using intensity threshold, neighborhood density and voxelization successively. Experiment was carried in Haidian Park, Beijing, and 24 trees were scanned by using the RIEGL VZ-400 scanner. The tree point clouds were processed by using the proposed method, whose classification results were compared with the manual classification results which were used as standard results. To evaluate the classification accuracy, three indicators were used in the experiment, which are Overall Accuracy (OA), Kappa coefficient (Kappa) and Matthews correlation coefficient (MCC). The ranges of OA, Kappa and MCC of the proposed method are from 0.9167 to 0.9872, from 0.7276 to 0.9191, and from 0.7544 to 0.9211 respectively. The average values of OA, Kappa and MCC are 0.9550, 0.8547 and 0.8627 respectively. Time cost of wood-leaf classification was also recorded to evaluate the algorithm efficiency. The average processing time are 1.4 seconds per million points. The results showed that the proposed method performed well automatically and quickly on wood-leaf classification based on the experimental dataset.
Automatic marker-free registration of tree point-cloud data based on rotating projection
Jan 30, 2020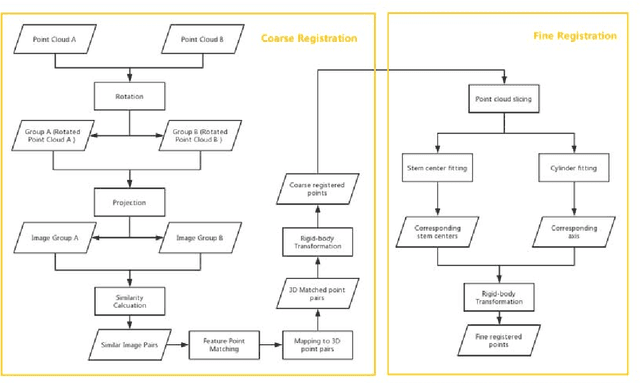
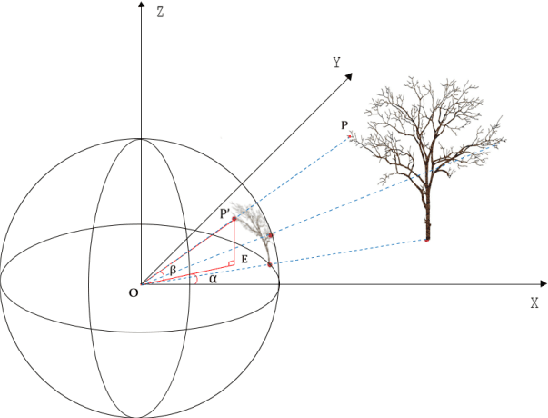
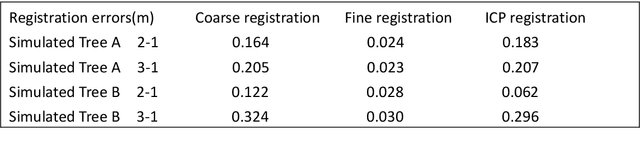
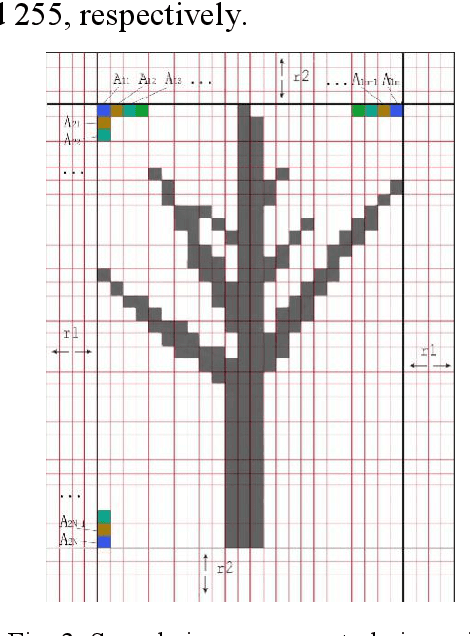
Point-cloud data acquired using a terrestrial laser scanner (TLS) play an important role in digital forestry research. Multiple scans are generally used to overcome occlusion effects and obtain complete tree structural information. However, it is time-consuming and difficult to place artificial reflectors in a forest with complex terrain for marker-based registration, a process that reduces registration automation and efficiency. In this study, we propose an automatic coarse-to-fine method for the registration of point-cloud data from multiple scans of a single tree. In coarse registration, point clouds produced by each scan are projected onto a spherical surface to generate a series of two-dimensional (2D) images, which are used to estimate the initial positions of multiple scans. Corresponding feature-point pairs are then extracted from these series of 2D images. In fine registration, point-cloud data slicing and fitting methods are used to extract corresponding central stem and branch centers for use as tie points to calculate fine transformation parameters. To evaluate the accuracy of registration results, we propose a model of error evaluation via calculating the distances between center points from corresponding branches in adjacent scans. For accurate evaluation, we conducted experiments on two simulated trees and a real-world tree. Average registration errors of the proposed method were 0.26m around on simulated tree point clouds, and 0.05m around on real-world tree point cloud.