 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfiniteVGGT: Visual Geometry Grounded Transformer for Endless Streams
Jan 05, 2026The grand vision of enabling persistent, large-scale 3D visual geometry understanding is shackled by the irreconcilable demands of scalability and long-term stability. While offline models like VGGT achieve inspiring geometry capability, their batch-based nature renders them irrelevant for live systems. Streaming architectures, though the intended solution for live operation, have proven inadequate. Existing methods either fail to support truly infinite-horizon inputs or suffer from catastrophic drift over long sequences. We shatter this long-standing dilemma with InfiniteVGGT, a causal visual geometry transformer that operationalizes the concept of a rolling memory through a bounded yet adaptive and perpetually expressive KV cache. Capitalizing on this, we devise a training-free, attention-agnostic pruning strategy that intelligently discards obsolete information, effectively ``rolling'' the memory forward with each new frame. Fully compatible with FlashAttention, InfiniteVGGT finally alleviates the compromise, enabling infinite-horizon streaming while outperforming existing streaming methods in long-term stability. The ultimate test for such a system is its performance over a truly infinite horizon, a capability that has been impossible to rigorously validate due to the lack of extremely long-term, continuous benchmarks. To address this critical gap, we introduce the Long3D benchmark, which, for the first time, enables a rigorous evaluation of continuous 3D geometry estimation on sequences about 10,000 frames. This provides the definitive evaluation platform for future research in long-term 3D geometry understanding. Code is available at: https://github.com/AutoLab-SAI-SJTU/InfiniteVGGT
Decentralized Collision-Free Control of Multiple Robots in 2D and 3D Spaces
Sep 18, 2017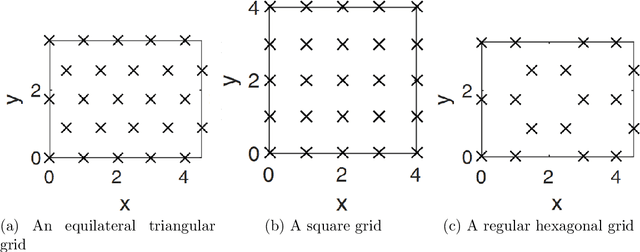

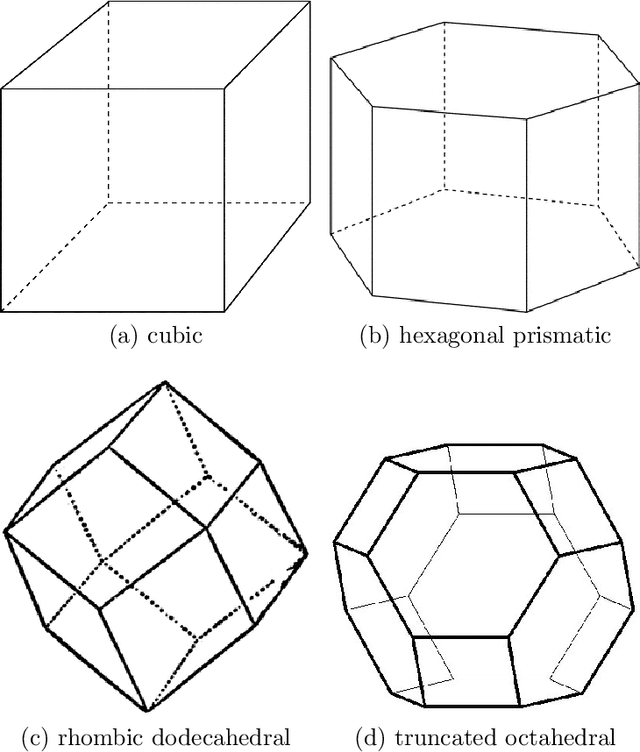
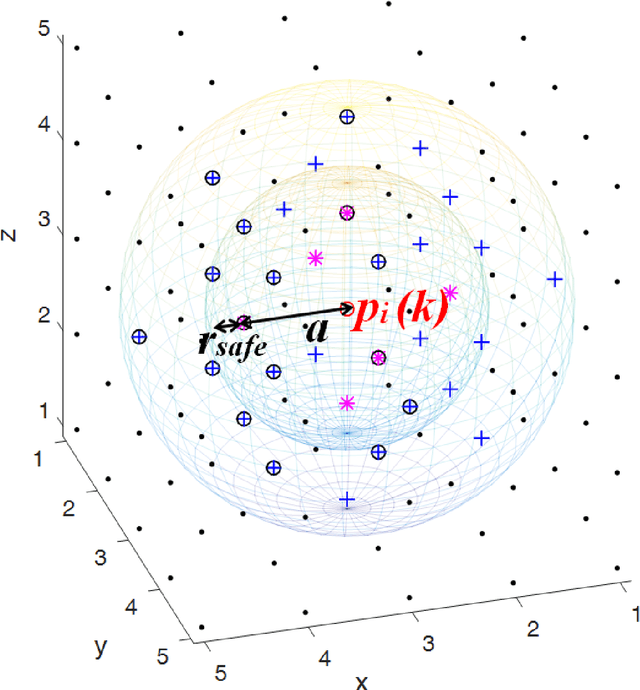
Decentralized control of robots has attracted huge research interests. However, some of the research used unrealistic assumptions without collision avoidance. This report focuses on the collision-free control for multiple robots in both complete coverage and search tasks in 2D and 3D areas which are arbitrary unknown. All algorithms are decentralized as robots have limited abilities and they are mathematically proved. The report starts with the grid selection in the two tasks. Grid patterns simplify the representation of the area and robots only need to move straightly between neighbor vertices. For the 100% complete 2D coverage, the equilateral triangular grid is proposed. For the complete coverage ignoring the boundary effect, the grid with the fewest vertices is calculated in every situation for both 2D and 3D areas. The second part is for the complete coverage in 2D and 3D areas. A decentralized collision-free algorithm with the above selected grid is presented driving robots to sections which are furthest from the reference point. The area can be static or expanding, and the algorithm is simulated in MATLAB. Thirdly, three grid-based decentralized random algorithms with collision avoidance are provided to search targets in 2D or 3D areas. The number of targets can be known or unknown. In the first algorithm, robots choose vacant neighbors randomly with priorities on unvisited ones while the second one adds the repulsive force to disperse robots if they are close. In the third algorithm, if surrounded by visited vertices, the robot will use the breadth-first search algorithm to go to one of the nearest unvisited vertices via the grid. The second search algorithm is verified on Pioneer 3-DX robots. The general way to generate the formula to estimate the search time is demonstrated. Algorithms are compared with five other algorithms in MATLAB to show their effectiveness.