 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDouble Low-Rank 4D Tensor Decomposition for Circular RIS-Aided mmWave MIMO-NOMA System Channel Estimation in Mobility Scenarios
Jun 09, 2025



Channel estimation is not only essential to highly reliable data transmission and massive device access but also an important component of the integrated sensing and communication (ISAC) in the sixth-generation (6G) mobile communication systems. In this paper, we consider a downlink channel estimation problem for circular reconfigurable intelligent surface (RIS)-aided millimeter-wave (mmWave) multiple-input multiple-output non-orthogonal multiple access (MIMO-NOMA) system in mobility scenarios. First, we propose a subframe partitioning scheme to facilitate the modeling of the received signal as a fourth-order tensor satisfying a canonical polyadic decomposition (CPD) form, thereby formulating the channel estimation problem as tensor decomposition and parameter extraction problems. Then, by exploiting both the global and local low-rank properties of the received signal, we propose a double low-rank 4D tensor decomposition model to decompose the received signal into four factor matrices, which is efficiently solved via alternating direction method of multipliers (ADMM). Subsequently, we propose a two-stage parameter estimation method based on the Jacobi-Anger expansion and the special structure of circular RIS to uniquely decouple the angle parameters. Furthermore, the time delay, Doppler shift, and channel gain parameters can also be estimated without ambiguities, and their estimation accuracy can be efficiently improved, especially at low signal-to-noise ratio (SNR). Finally, a concise closed-form expression for the Cram\'er-Rao bound (CRB) is derived as a performance benchmark. Numerical experiments are conducted to demonstrate the effectiveness of the proposed method compared with the other discussed methods.
Integrated Decision and Control at Multi-Lane Intersections with Mixed Traffic Flow
Aug 30, 2021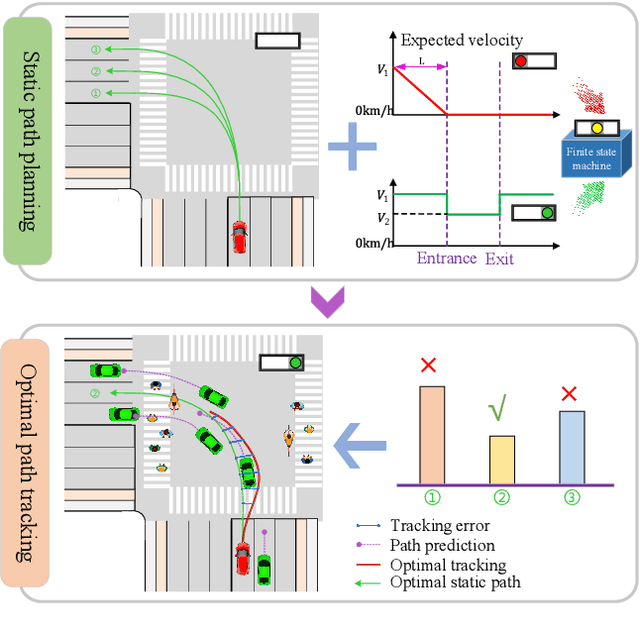
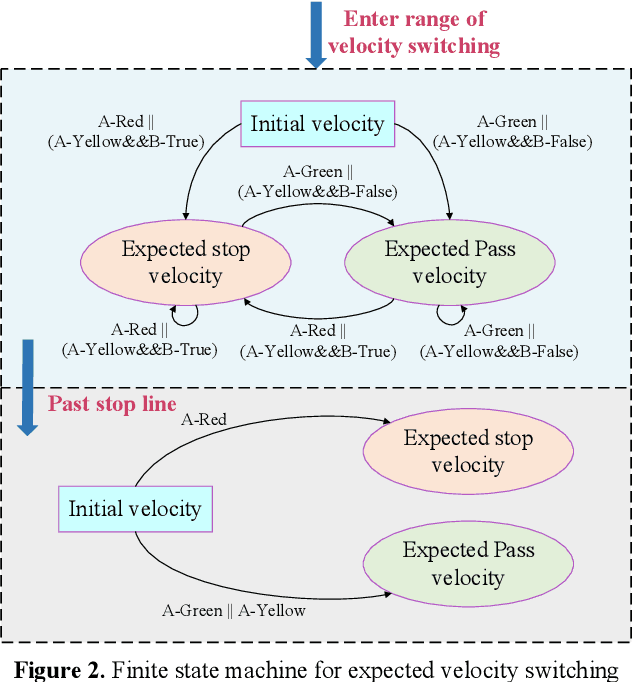
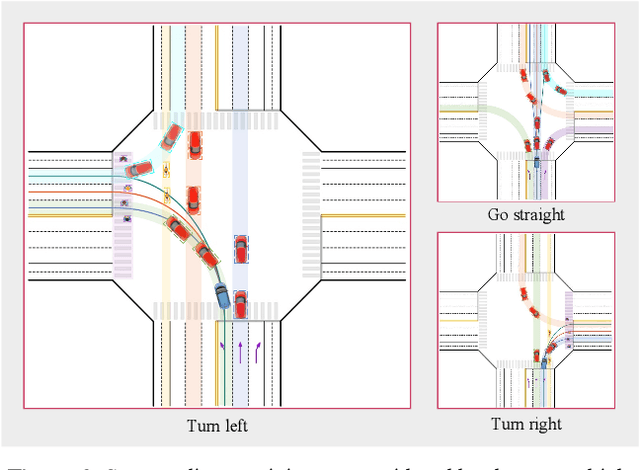
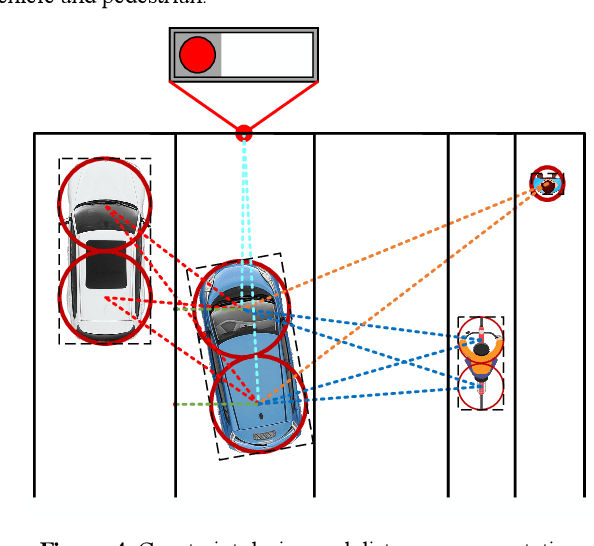
Autonomous driving at intersections is one of the most complicated and accident-prone traffic scenarios, especially with mixed traffic participants such as vehicles, bicycles and pedestrians. The driving policy should make safe decisions to handle the dynamic traffic conditions and meet the requirements of on-board computation. However, most of the current researches focuses on simplified intersections considering only the surrounding vehicles and idealized traffic lights. This paper improves the integrated decision and control framework and develops a learning-based algorithm to deal with complex intersections with mixed traffic flows, which can not only take account of realistic characteristics of traffic lights, but also learn a safe policy under different safety constraints. We first consider different velocity models for green and red lights in the training process and use a finite state machine to handle different modes of light transformation. Then we design different types of distance constraints for vehicles, traffic lights, pedestrians, bicycles respectively and formulize the constrained optimal control problems (OCPs) to be optimized. Finally, reinforcement learning (RL) with value and policy networks is adopted to solve the series of OCPs. In order to verify the safety and efficiency of the proposed method, we design a multi-lane intersection with the existence of large-scale mixed traffic participants and set practical traffic light phases. The simulation results indicate that the trained decision and control policy can well balance safety and tracking performance. Compared with model predictive control (MPC), the computational time is three orders of magnitude lower.