 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Disturbance Rejection for Robotic Bipedal Walking: System-Level-Synthesis with Step-to-step Dynamics Approximation
Jan 26, 2022
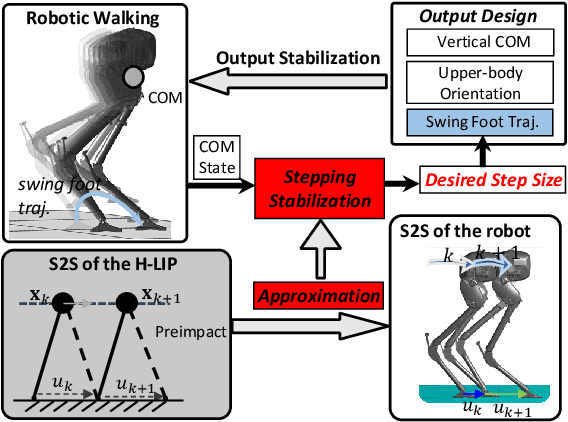
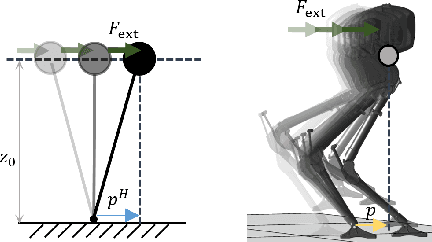
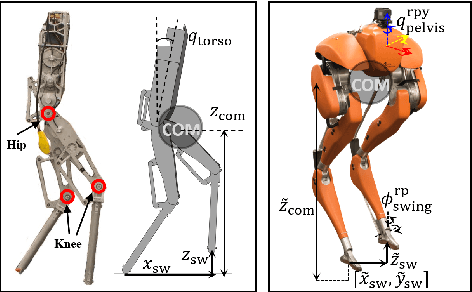
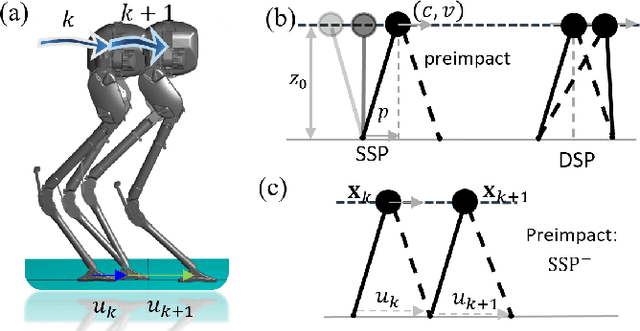
We present a stepping stabilization control that addresses external push disturbances on bipedal walking robots. The stepping control is synthesized based on the step-to-step (S2S) dynamics of the robot that is controlled to have an approximately constant center of mass (COM) height. We first learn a linear S2S dynamics with bounded model discrepancy from the undisturbed walking behaviors of the robot, where the walking step size is taken as the control input to the S2S dynamics. External pushes are then considered as disturbances to the learned S2S (L-S2S) dynamics. We then apply the system-level-synthesis (SLS) approach on the disturbed L-S2S dynamics to robustly stabilize the robot to the desired walking while satisfying the kinematic constraints of the robot. We successfully realize the proposed approach on the walking of the bipedal robot AMBER and Cassie subject to push disturbances, showing that the approach is general, effective, and computationally-efficient for robust disturbance rejection.
Bipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
Apr 21, 2021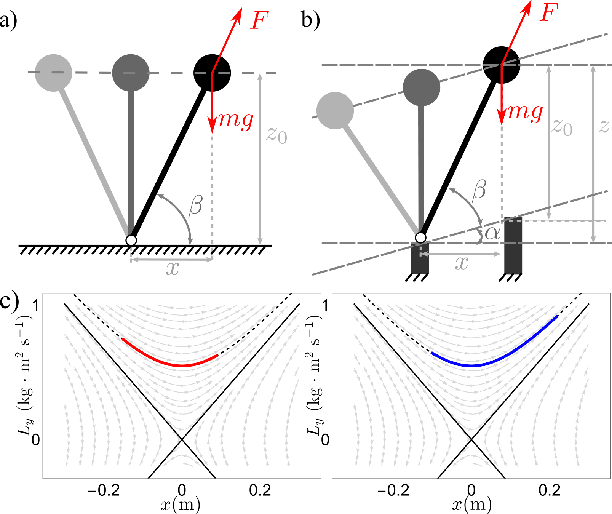
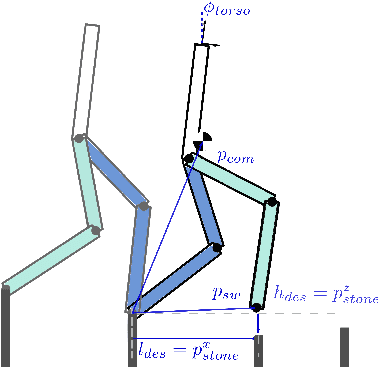
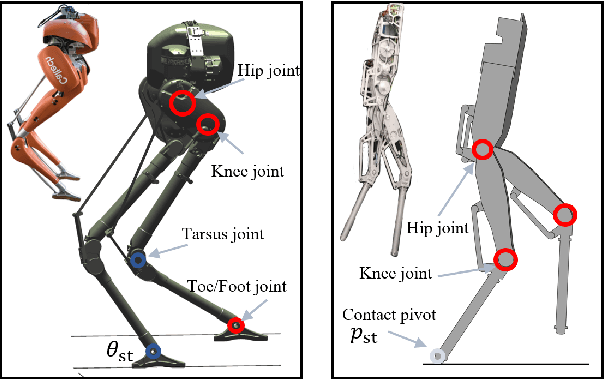
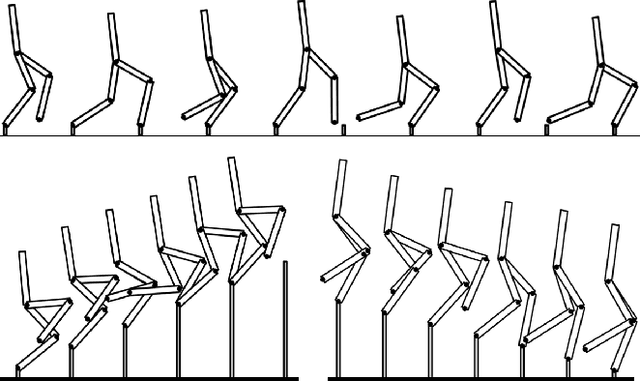
This paper presents an online walking gait synthesis and a feedback control methodology to enable stable walking on constrained footholds for bipedal robots. For this challenging task, the foot placement and center of pressure cannot be changed, which hinders the application of state-of-art stepping controllers or zero-moment-point (ZMP) based approaches for walking generation. As a result, this paper takes a different approach to modulate the change of the angular momentum about the foot-ground contact pivot at the discrete impact with vertical center of mass (COM) velocity. We utilize the underactuated Linear Inverted Pendulum (LIP) model for approximating the underactuated walking dynamics to provide the desired post-impact angular momentum for each step. Outputs are constructed via online optimization combined with closed-form polynomials and then tracked via a quadratic program based controller. This method is implemented online on two robot models, AMBER and Cassie, for which stable walking behaviors with constrained footholds are realized on flat ground, stairs, and randomly located stepping stones.
SLIP Walking over Rough Terrain via H-LIP Stepping and Backstepping-Barrier Function Inspired Quadratic Program
Feb 19, 2021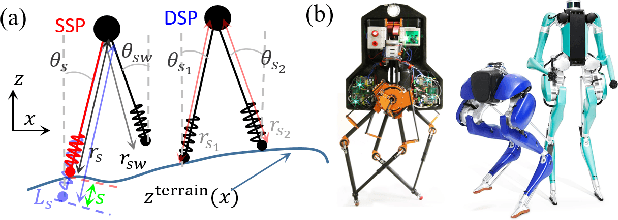
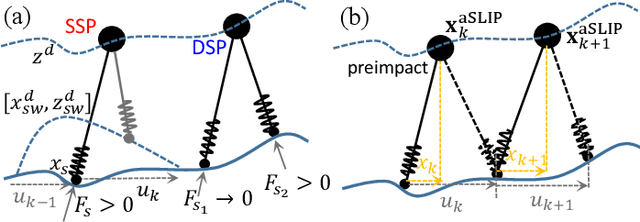
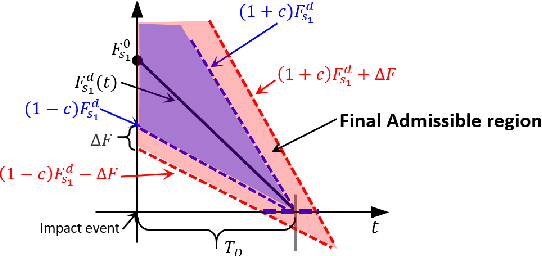
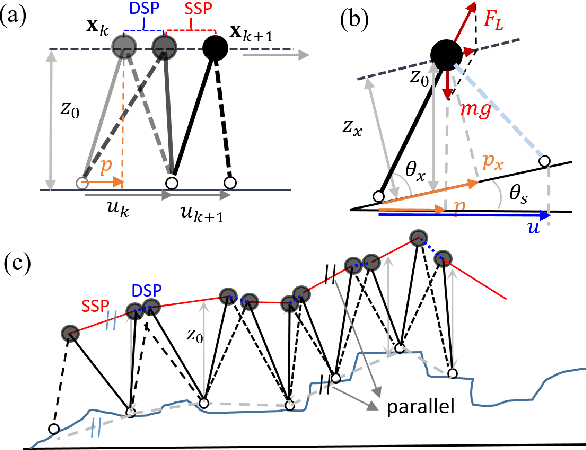
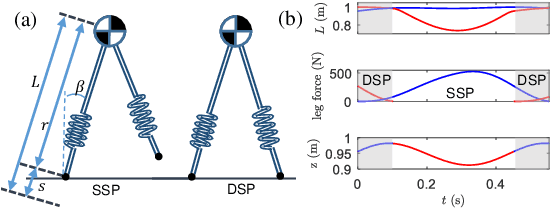
We present an advanced and novel control method to enable actuated Spring Loaded Inverted Pendulum model to walk over rough and challenging terrains. The high-level philosophy is the decoupling of the controls of the vertical and horizontal states. The vertical state is controlled via Backstepping-Barrier Function (BBF) based quadratic programs: a combination of control Lyapunov backstepping and control barrier function, both of which provide inequality constraints on the inputs. The horizontal state is stabilized via Hybrid-Linear Inverted Pendulum (H-LIP) based stepping, which has a closed-form formulation. Therefore, the implementation is computationally-efficient. We evaluate our method in simulation, which demonstrates the aSLIP walking over various terrains, including slopes, stairs, and general rough terrains with uncertainties.
3D Underactuated Bipedal Walking via H-LIP based Gait Synthesis and Stepping Stabilization
Feb 05, 2021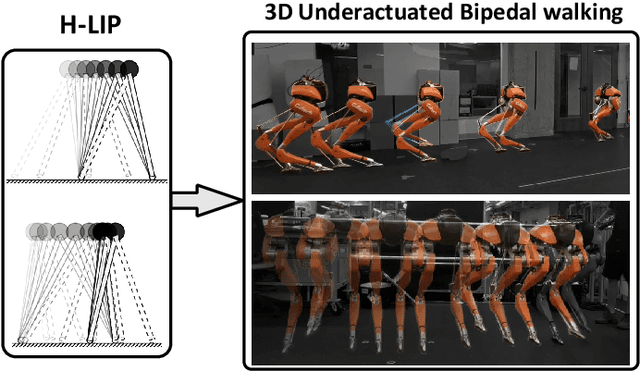
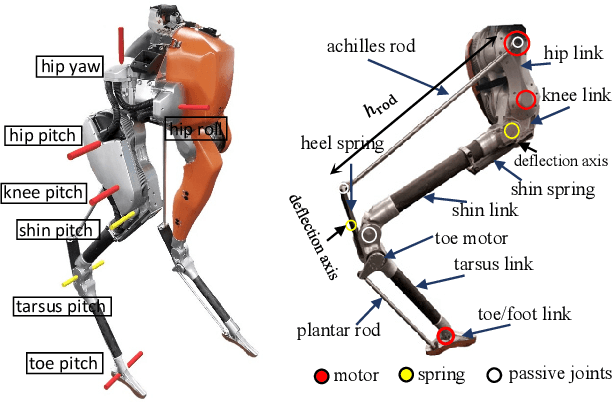
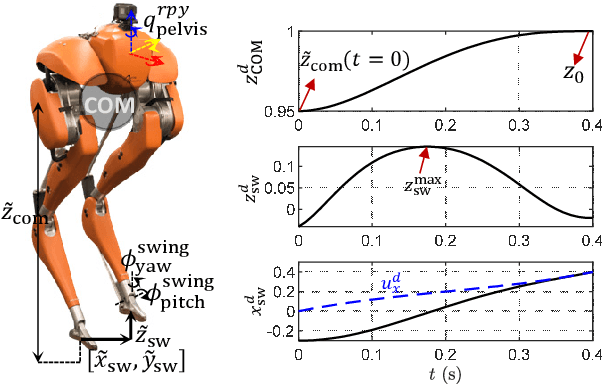
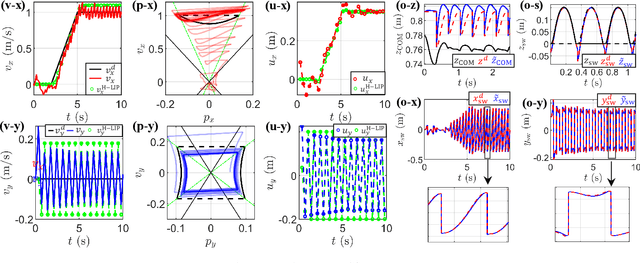
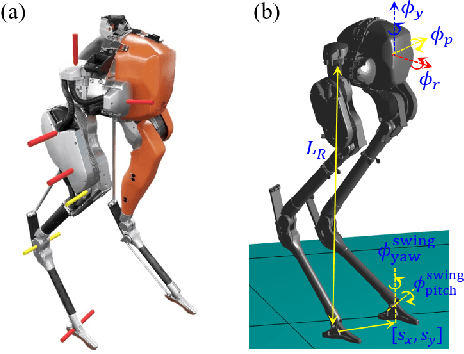
In this paper, we present a Hybrid-Linear Inverted Pendulum (H-LIP) based approach for synthesizing and stabilizing 3D underactuated bipedal walking. The H-LIP model is proposed to capture the essential components of the underactuated part and actuated part of the robotic walking. The walking gait of the robot is then synthesized based on the H-LIP. We comprehensively characterize the periodic orbits of the H-LIP and provably derive their stepping stabilization. The step-to-step (S2S) dynamics of the H-LIP is then utilized to approximate the S2S dynamics of the horizontal state of the center of mass (COM) of the robotic walking, which results in a H-LIP based stepping controller to provide desired step sizes to stabilize the robotic walking. By realizing the desired step sizes, the robot achieves dynamic and stable walking. The approach is evaluated in both simulation and experiment on the 3D underactuated bipedal robot Cassie, which demonstrate dynamic walking behaviors with both versatility and robustness.
Global Position Control on Underactuated Bipedal Robots: Step-to-step Dynamics Approximation for Step Planning
Nov 11, 2020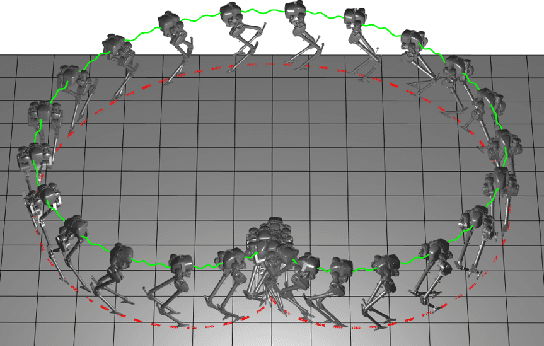
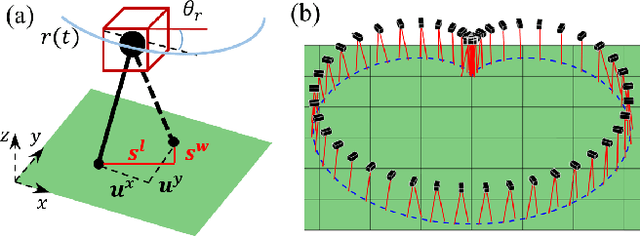
Global position control for underactuated bipedal walking is a challenging problem due to the lack of actuation on the feet of the robots. In this paper, we apply the Hybrid-Linear Inverted Pendulum (H-LIP) based stepping on 3D underactuated bipedal robots for global position control. The step-to-step (S2S) dynamics of the H-LIP walking approximates the actual S2S dynamics of the walking of the robot, where the step size is considered as the input. Thus the feedback controller based on the H-LIP approximately controls the robot to behave like the H-LIP, the differences between which stay in an error invariant set. Model Predictive Control (MPC) is applied to the H-LIP for global position control in 3D. The H-LIP stepping then generates desired step sizes for the robot to track. Moreover, turning behavior is integrated with the step planning. The proposed framework is verified on the 3D underactuated bipedal robot Cassie in simulation together with a proof-of-concept experiment.
Risk-Sensitive Path Planning via CVaR Barrier Functions: Application to Bipedal Locomotion
Nov 03, 2020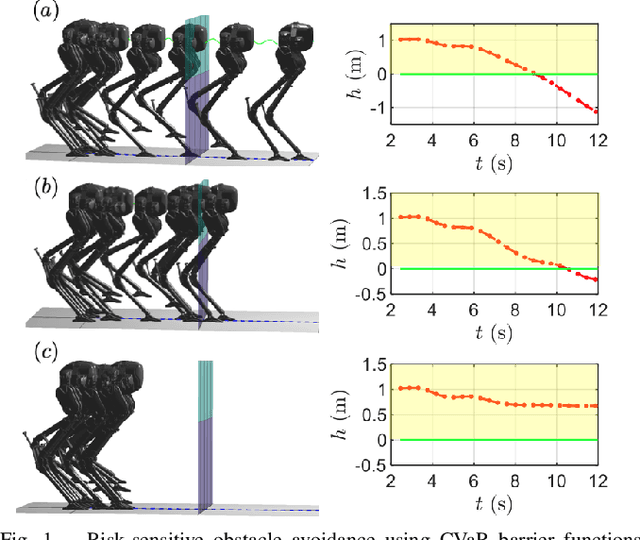
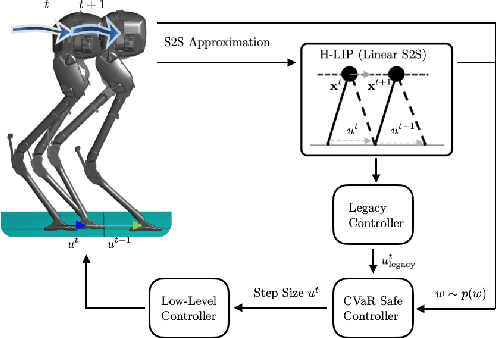
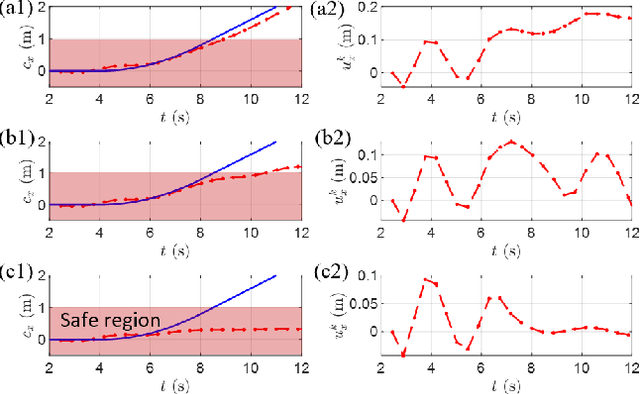
Enforcing safety of robotic systems in the presence of stochastic uncertainty is a challenging problem. Traditionally,researchers have proposed safety in the statistical mean as a safety measure in this case. However, ensuring safety in the statistical mean is only reasonable if robot safe behavior in the large number of runs is of interest, which precludes the use of mean safety in practical scenarios. In this paper, we propose a risk sensitive notion of safety called conditional-value-at-risk (CVaR) safety, which is concerned with safe performance in the worst case realizations. We introduce CVaR barrier functions asa tool to enforce CVaR safety and propose conditions for their Boolean compositions. Given a legacy controller, we show that we can design a minimally interfering CVaR safe controller via solving difference convex programs. We elucidate the proposed method by applying it to a bipedal locomotion case study.
Dynamic and Versatile Humanoid Walking via Embedding 3D Actuated SLIP Model with Hybrid LIP Based Stepping
Aug 06, 2020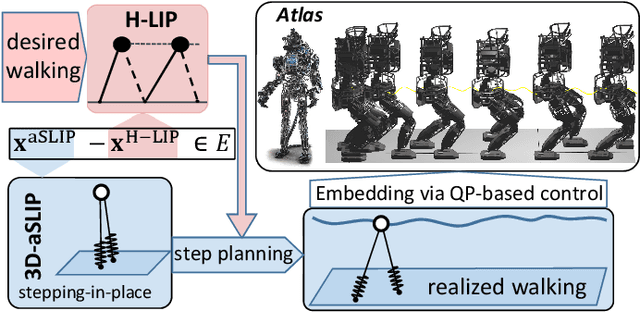
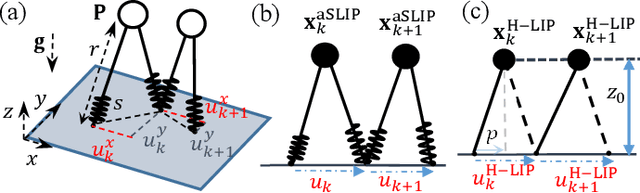
In this paper, we propose an efficient approach to generate dynamic and versatile humanoid walking with non-constant center of mass (COM) height. We exploit the benefits of using reduced order models (ROMs) and stepping control to generate dynamic and versatile walking motion. Specifically, we apply the stepping controller based on the Hybrid Linear Inverted Pendulum Model (H-LIP) to perturb a periodic walking motion of a 3D actuated Spring Loaded Inverted Pendulum (3D-aSLIP), which yields versatile walking behaviors of the 3D-aSLIP, including various 3D periodic walking, fixed location tracking, and global trajectory tracking. The 3D-aSLIP walking is then embedded on the fully-actuated humanoid via the task space control on the COM dynamics and ground reaction forces. The proposed approach is realized on the robot model of Atlas in simulation, wherein versatile dynamic motions are generated.
Sequential Motion Planning for Bipedal Somersault via Flywheel SLIP and Momentum Transmission with Task Space Control
Aug 06, 2020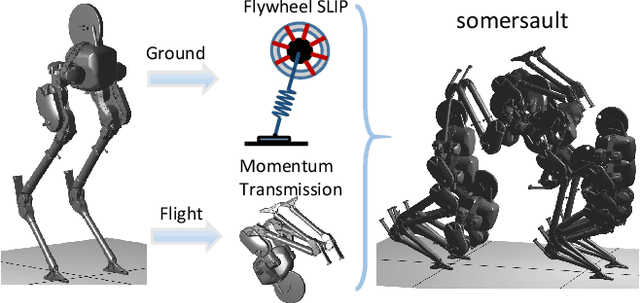
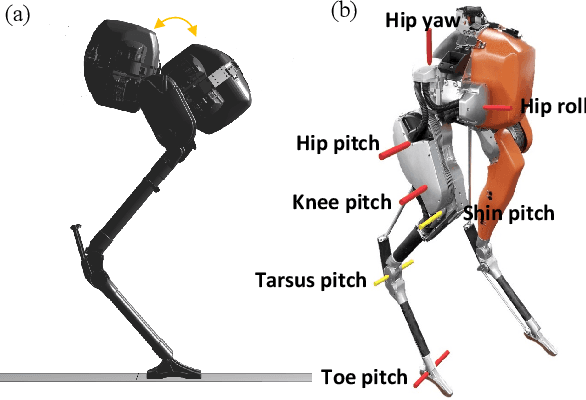
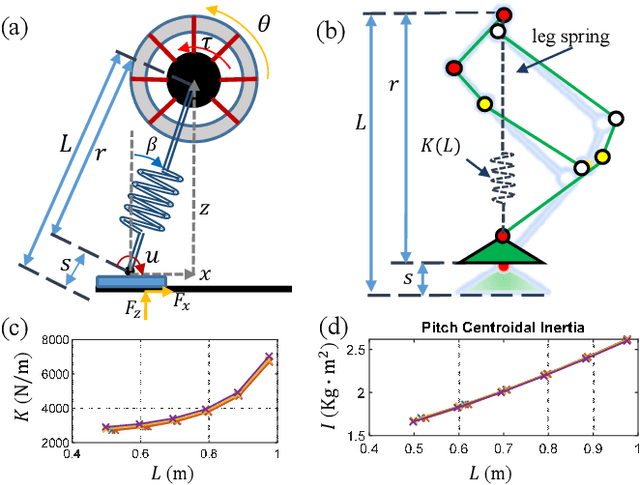
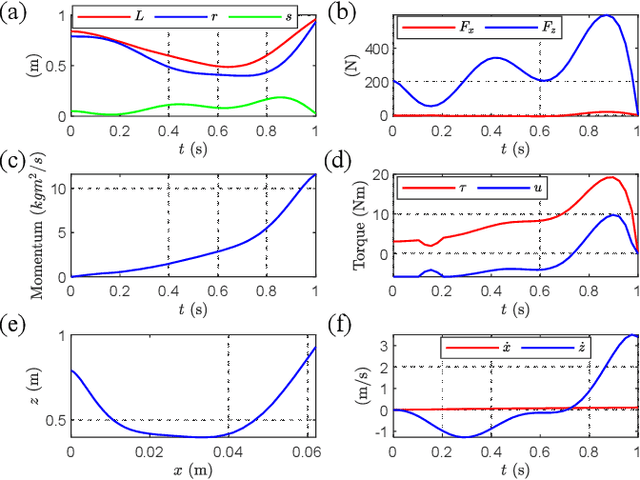
In this paper, we present a sequential motion planning and control method for generating somersaults on bipedal robots. The somersault (backflip or frontflip) is considered as a coupling between an axile hopping motion and a rotational motion about the center of mass of the robot; these are encoded by a hopping Spring-loaded Inverted Pendulum (SLIP) model and the rotation of a Flywheel, respectively. We thus present the Flywheel SLIP model for generating the desired motion on the ground phase. In the flight phase, we present a momentum transmission method to adjust the orientation of the lower body based on the conservation of the centroidal momentum. The generated motion plans are realized on the full-dimensional robot via momentum-included task space control. Finally, the proposed method is implemented on a modified version of the bipedal robot Cassie in simulation wherein multiple somersault motions are generated.
Motion Decoupling and Composition via Reduced Order Model Optimization for Dynamic Humanoid Walking with CLF-QP based Active Force Control
Oct 01, 2019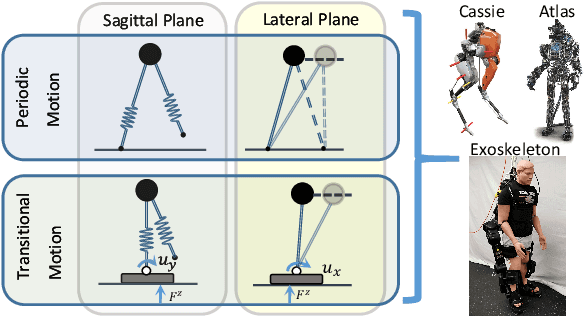
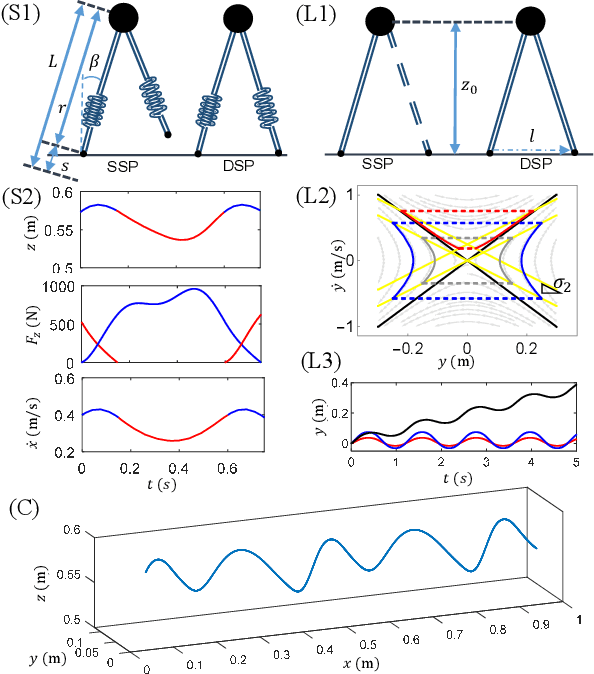
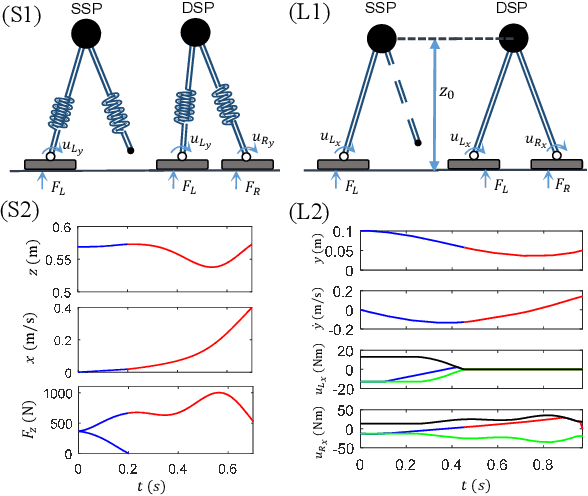
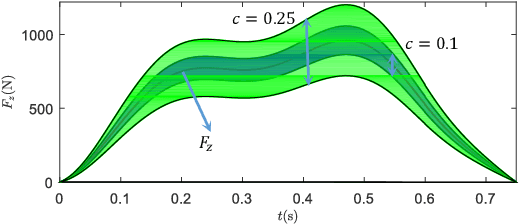
In this paper, 3D humanoid walking is decoupled into periodic and transitional motion, each of which is decoupled into planar walking in the sagittal and lateral plane. Reduced order models (ROMs), i.e. actuated Spring-loaded Inverted Pendulum (aSLIP) models and Hybrid-Linear Inverted Pendulum (H-LIP) models, are utilized for motion generation on the desired center of mass (COM) dynamics for each type of planar motion. The periodic motion is planned via point foot (underactuated) ROMs for dynamic motion with minimum ankle actuation, while the transitional motion is planned via foot-actuated ROMs for fast and smooth transition. Composition of the planar COM dynamics yields the desired COM dynamics in 3D, which is embedded on the humanoid via control Lyapunov function based Quadratic programs (CLF-QPs). Additionally, the ground reaction force profiles of the aSLIP walking are used as desired references for ground contact forces in the CLF-QPs for smooth domain transitions. The proposed framework is realized on a lower-limb exoskeleton in simulation wherein different walking motions are achieved.
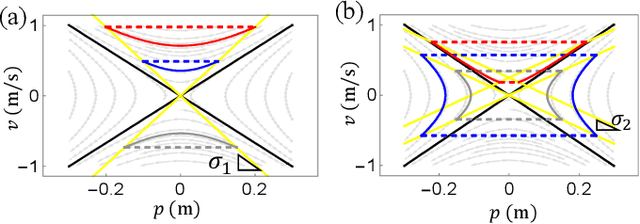
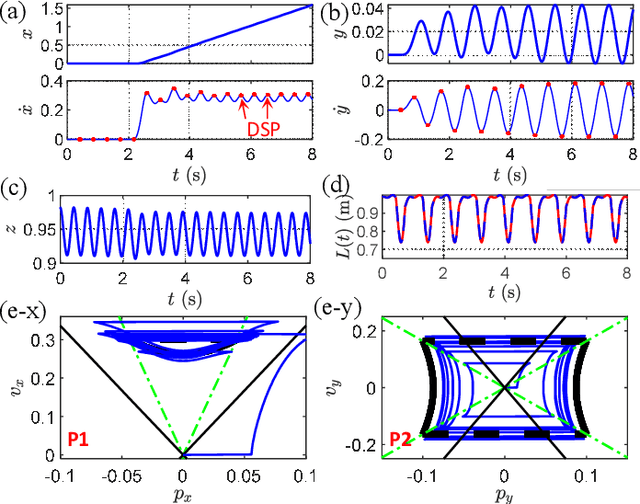
Orbit Characterization, Stabilization and Composition on 3D Underactuated Bipedal Walking via Hybrid Passive Linear Inverted Pendulum Model
Oct 01, 2019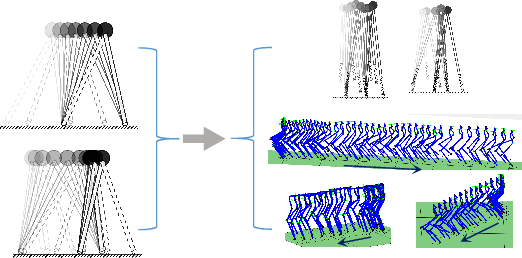
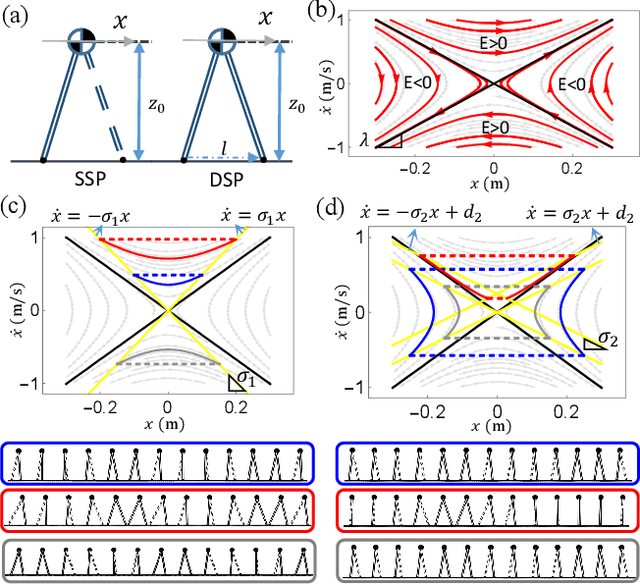
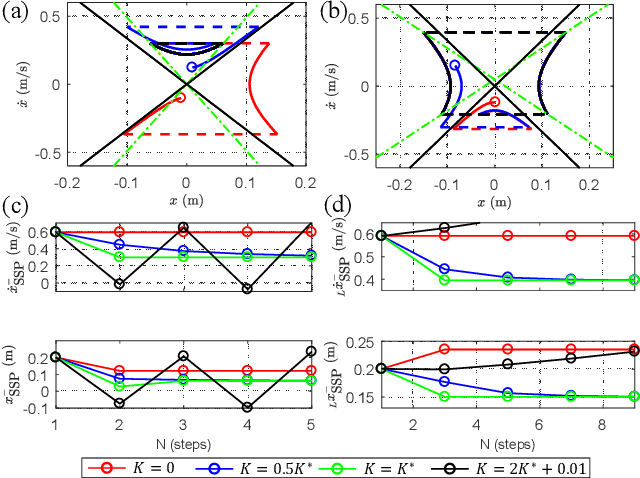
A Hybrid passive Linear Inverted Pendulum (HLIP) model is proposed for characterizing, stabilizing and composing periodic orbits for 3D underactuated bipedal walking. Specifically, Period-1 (P1) and Period-2 (P2) orbits are geometrically characterized in the state space of the H-LIP. Stepping controllers are designed for global stabilization of the orbits. Valid ranges of the gains and their optimality are derived. The optimal stepping controller is used to create and stabilize the walking of bipedal robots. An actuated Spring-loaded Inverted Pendulum (aSLIP) model and the underactuated robot Cassie are used for illustration. Both the aSLIP walking with P1 or P2 orbits and the Cassie walking with all 3D compositions of the P1 and P2 orbits can be smoothly generated and stabilized from a stepping-in-place motion. This approach provides a perspective and a methodology towards continuous gait generation and stabilization for 3D underactuated walking robots.