 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagramRAG: A Lightweight Framework to Retrieve Scientific Diagram for Figure Generation
May 27, 2026Scientific diagrams are essential for communicating complex methodologies in academic papers. A natural way for researchers to specify such diagrams is through rough sketches, where text labels, connectors, and spatial arrangements express early semantic and topological intentions. However, sketches are usually incomplete, making them insufficient for directly producing publication-quality diagrams. Existing sketch-based generation methods mainly reconstruct the sketch itself, while recent text-driven diagram generation frameworks rely on textual semantics and do not fully exploit the topological structure contained in sketches. In this paper, we introduce DiagramRAG, a lightweight retrieval-augmented framework for sketch-based scientific diagram completion. Given a user sketch, DiagramRAG retrieves reference diagrams that are both semantically relevant to the sketch content and topologically compatible with its structure, and uses them to guide downstream diagram generation. To enable efficient structure-aware retrieval, we represent diagrams as knowledge graphs, synthesize sketch variants at different simplification levels, and train an embedding model to align sketches with compatible diagrams in a shared space. The retrieved references further provide content, topology, and visual priors for completing and rendering the final diagram. Experiments show that DiagramRAG achieves F1-scores of 0.848 and 0.802 on DiagramBank and FigureBench, respectively, and improves generation quality with the best VLM-as-a-Judge score of 7.170, while reducing inference latency to 35.48 seconds per sample. Our code and data are available at https://anonymous.4open.science/r/DiagramRAG-A262 and https://huggingface.co/datasets/anonymous-review-a262/DiagramSketch.
Object Classification Utilizing Neuromorphic Proprioceptive Signals in Active Exploration: Validated on a Soft Anthropomorphic Hand
May 23, 2025Proprioception, a key sensory modality in haptic perception, plays a vital role in perceiving the 3D structure of objects by providing feedback on the position and movement of body parts. The restoration of proprioceptive sensation is crucial for enabling in-hand manipulation and natural control in the prosthetic hand. Despite its importance, proprioceptive sensation is relatively unexplored in an artificial system. In this work, we introduce a novel platform that integrates a soft anthropomorphic robot hand (QB SoftHand) with flexible proprioceptive sensors and a classifier that utilizes a hybrid spiking neural network with different types of spiking neurons to interpret neuromorphic proprioceptive signals encoded by a biological muscle spindle model. The encoding scheme and the classifier are implemented and tested on the datasets we collected in the active exploration of ten objects from the YCB benchmark. Our results indicate that the classifier achieves more accurate inferences than existing learning approaches, especially in the early stage of the exploration. This system holds the potential for development in the areas of haptic feedback and neural prosthetics.
DeepICP: An End-to-End Deep Neural Network for 3D Point Cloud Registration
May 10, 2019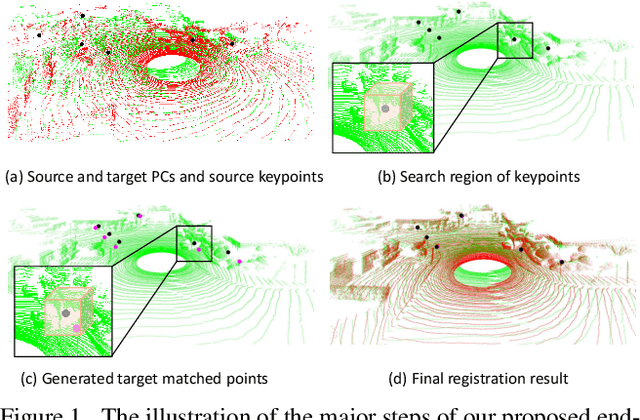
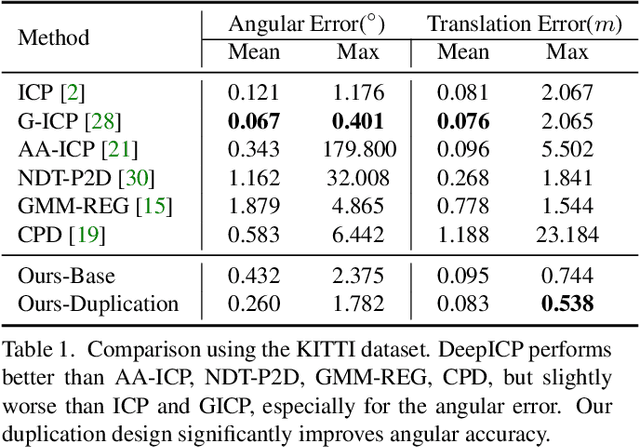
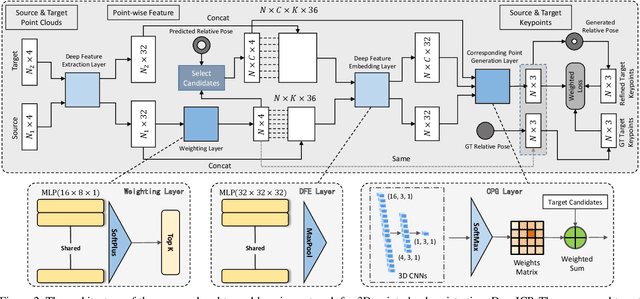
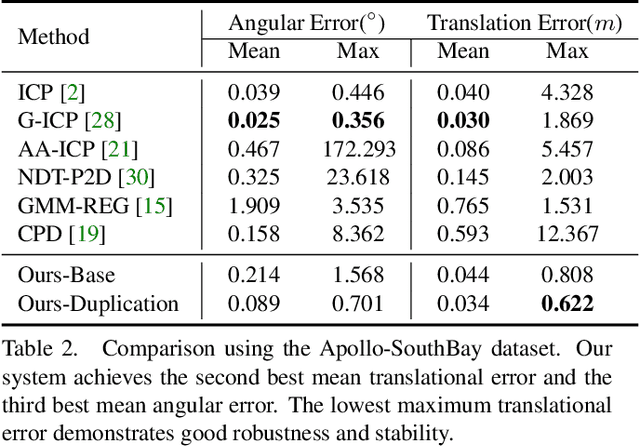
We present DeepICP - a novel end-to-end learning-based 3D point cloud registration framework that achieves comparable registration accuracy to prior state-of-the-art geometric methods. Different from other keypoint based methods where a RANSAC procedure is usually needed, we implement the use of various deep neural network structures to establish an end-to-end trainable network. Our keypoint detector is trained through this end-to-end structure and enables the system to avoid the inference of dynamic objects, leverages the help of sufficiently salient features on stationary objects, and as a result, achieves high robustness. Rather than searching the corresponding points among existing points, the key contribution is that we innovatively generate them based on learned matching probabilities among a group of candidates, which can boost the registration accuracy. Our loss function incorporates both the local similarity and the global geometric constraints to ensure all above network designs can converge towards the right direction. We comprehensively validate the effectiveness of our approach using both the KITTI dataset and the Apollo-SouthBay dataset. Results demonstrate that our method achieves comparable or better performance than the state-of-the-art geometry-based methods. Detailed ablation and visualization analysis are included to further illustrate the behavior and insights of our network. The low registration error and high robustness of our method makes it attractive for substantial applications relying on the point cloud registration task.