 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping and Integrating Trust Modeling into Multi-Objective Reinforcement Learning for Intelligent Agricultural Management
May 16, 2025



Precision agriculture, enhanced by artificial intelligence (AI), offers promising tools such as remote sensing, intelligent irrigation, fertilization management, and crop simulation to improve agricultural efficiency and sustainability. Reinforcement learning (RL), in particular, has outperformed traditional methods in optimizing yields and resource management. However, widespread AI adoption is limited by gaps between algorithmic recommendations and farmers' practical experience, local knowledge, and traditional practices. To address this, our study emphasizes Human-AI Interaction (HAII), focusing on transparency, usability, and trust in RL-based farm management. We employ a well-established trust framework - comprising ability, benevolence, and integrity - to develop a novel mathematical model quantifying farmers' confidence in AI-based fertilization strategies. Surveys conducted with farmers for this research reveal critical misalignments, which are integrated into our trust model and incorporated into a multi-objective RL framework. Unlike prior methods, our approach embeds trust directly into policy optimization, ensuring AI recommendations are technically robust, economically feasible, context-aware, and socially acceptable. By aligning technical performance with human-centered trust, this research supports broader AI adoption in agriculture.
R-TOD: Real-Time Object Detector with Minimized End-to-End Delay for Autonomous Driving
Oct 23, 2020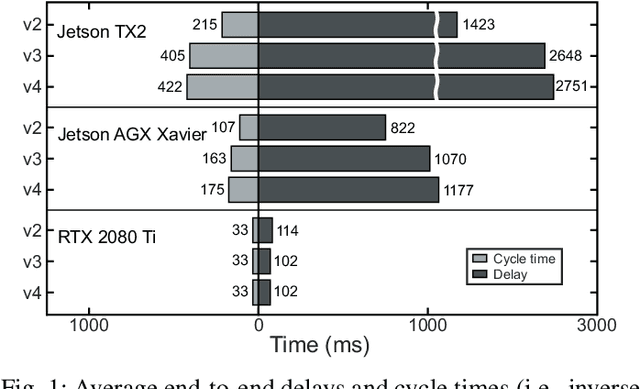
For realizing safe autonomous driving, the end-to-end delays of real-time object detection systems should be thoroughly analyzed and minimized. However, despite recent development of neural networks with minimized inference delays, surprisingly little attention has been paid to their end-to-end delays from an object's appearance until its detection is reported. With this motivation, this paper aims to provide more comprehensive understanding of the end-to-end delay, through which precise best- and worst-case delay predictions are formulated, and three optimization methods are implemented: (i) on-demand capture, (ii) zero-slack pipeline, and (iii) contention-free pipeline. Our experimental results show a 76% reduction in the end-to-end delay of Darknet YOLO (You Only Look Once) v3 (from 1070 ms to 261 ms), thereby demonstrating the great potential of exploiting the end-to-end delay analysis for autonomous driving. Furthermore, as we only modify the system architecture and do not change the neural network architecture itself, our approach incurs no penalty on the detection accuracy.