 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient B-spline-Based Kinodynamic Replanning Framework for Quadrotors
Jun 24, 2019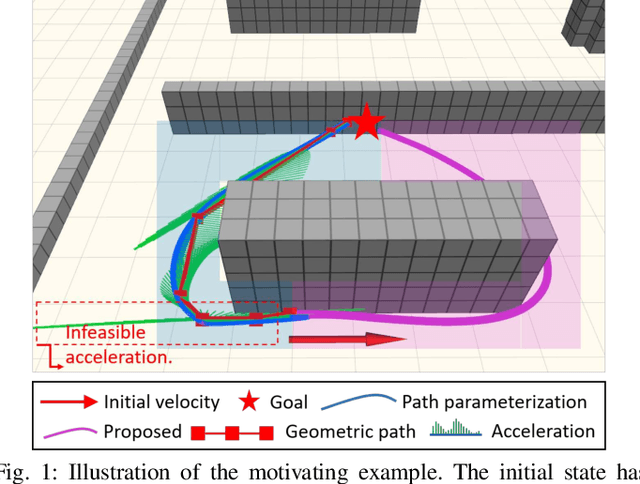
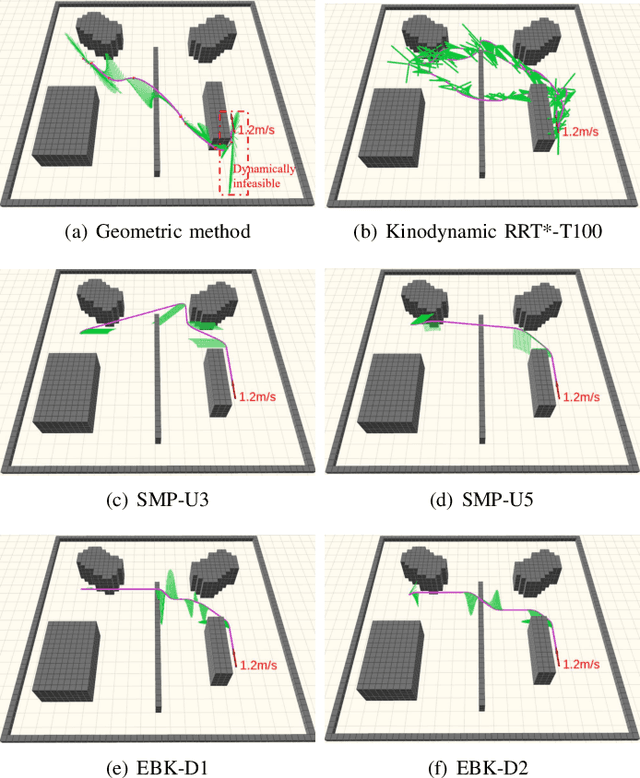
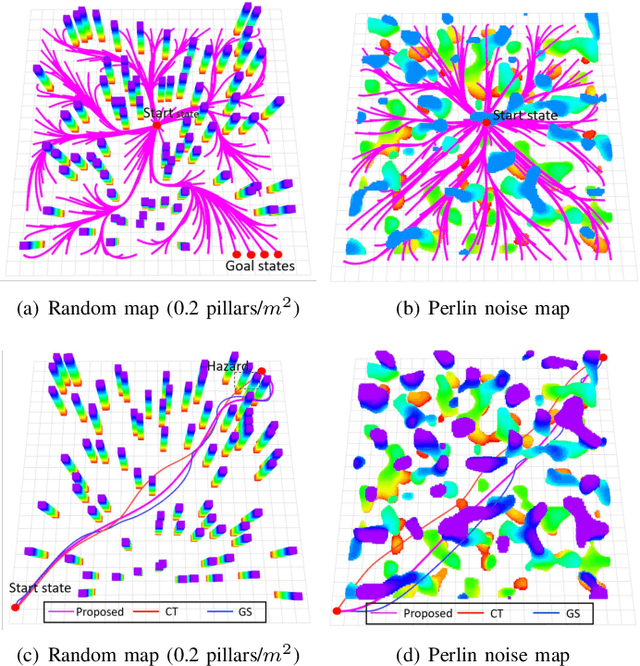
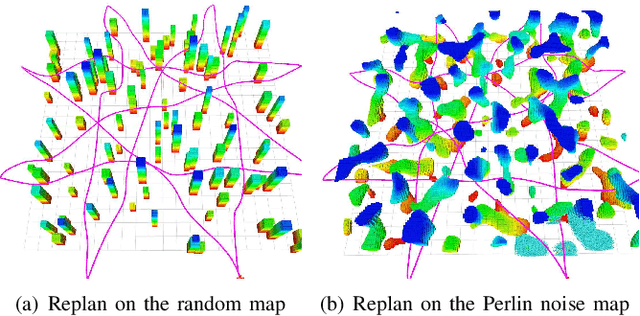
Trajectory replanning for quadrotors is essential to enable fully autonomous flight in unknown environments. Hierarchical motion planning frameworks, which combine path planning with path parameterization, are popular due to their time efficiency. However, the path planning cannot properly deal with non-static initial states of the quadrotor, which may result in non-smooth or even dynamically infeasible trajectories. In this paper, we present an efficient kinodynamic replanning framework by exploiting the advantageous properties of the B-spline, which facilitates dealing with the non-static state and guarantees safety and dynamical feasibility. Our framework starts with an efficient B-spline-based kinodynamic (EBK) search algorithm which finds a feasible trajectory with minimum control effort and time. To compensate for the discretization induced by the EBK search, an elastic optimization (EO) approach is proposed to refine the control point placement to the optimal location. Systematic comparisons against the state-of-the-art are conducted to validate the performance. Comprehensive onboard experiments using two different vision-based quadrotors are carried out showing the general applicability of the framework.
Trajectory Replanning for Quadrotors Using Kinodynamic Search and Elastic Optimization
Mar 04, 2019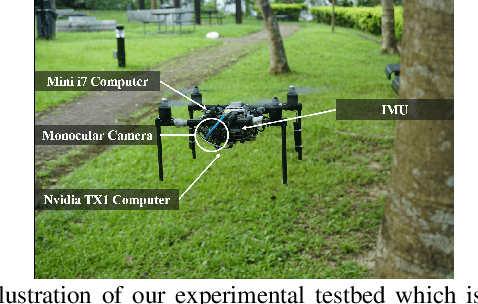
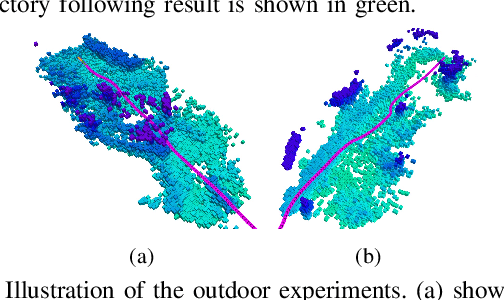
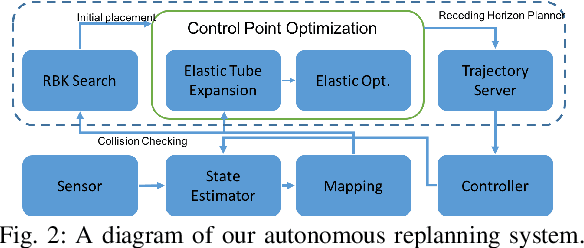
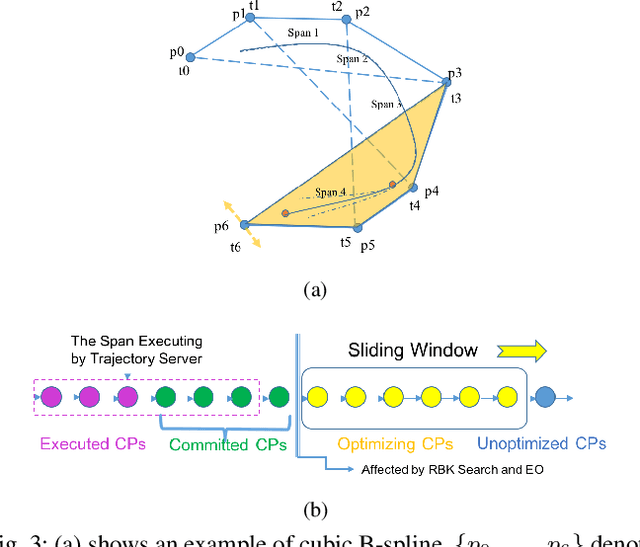
We focus on a replanning scenario for quadrotors where considering time efficiency, non-static initial state and dynamical feasibility is of great significance. We propose a real-time B-spline based kinodynamic (RBK) search algorithm, which transforms a position-only shortest path search (such as A* and Dijkstra) into an efficient kinodynamic search, by exploring the properties of B-spline parameterization. The RBK search is greedy and produces a dynamically feasible time-parameterized trajectory efficiently, which facilitates non-static initial state of the quadrotor. To cope with the limitation of the greedy search and the discretization induced by a grid structure, we adopt an elastic optimization (EO) approach as a post-optimization process, to refine the control point placement provided by the RBK search. The EO approach finds the optimal control point placement inside an expanded elastic tube which represents the free space, by solving a Quadratically Constrained Quadratic Programming (QCQP) problem. We design a receding horizon replanner based on the local control property of B-spline. A systematic comparison of our method against two state-of-the-art methods is provided. We integrate our replanning system with a monocular vision-based quadrotor and validate our performance onboard.