 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Cooperative Aerial System of A Payload Drone Equipped with Dexterous Rappelling End Droid for Cluttered Space Pickup
May 26, 2025In cluttered spaces, such as forests, drone picking up a payload via an abseil claw is an open challenge, as the cable is likely tangled and blocked by the branches and obstacles. To address such a challenge, in this work, a cooperative aerial system is proposed, which consists of a payload drone and a dexterous rappelling end droid. The two ends are linked via a Kevlar tether cable. The end droid is actuated by four propellers, which enable mid-air dexterous adjustment of clawing angle and guidance of cable movement. To avoid tanglement and rappelling obstacles, a trajectory optimization method that integrates cable length constraints and dynamic feasibility is developed, which guarantees safe pickup. A tether cable dynamic model is established to evaluate real-time cable status, considering both taut and sagging conditions. Simulation and real-world experiments are conducted to demonstrate that the proposed system is capable of picking up payload in cluttered spaces. As a result, the end droid can reach the target point successfully under cable constraints and achieve passive retrieval during the lifting phase without propulsion, which enables effective and efficient aerial manipulation.
Truth Discovery with Memory Network
Nov 07, 2016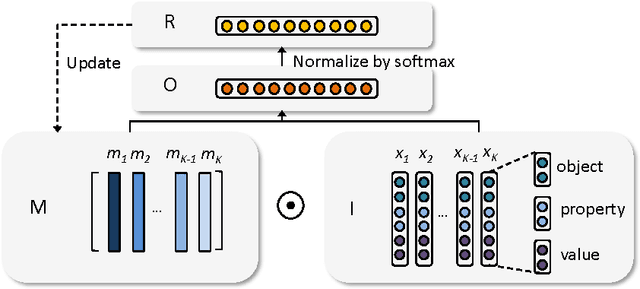
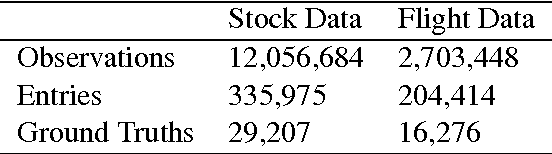
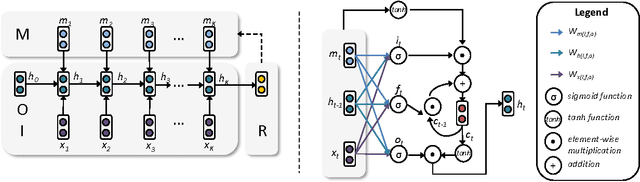
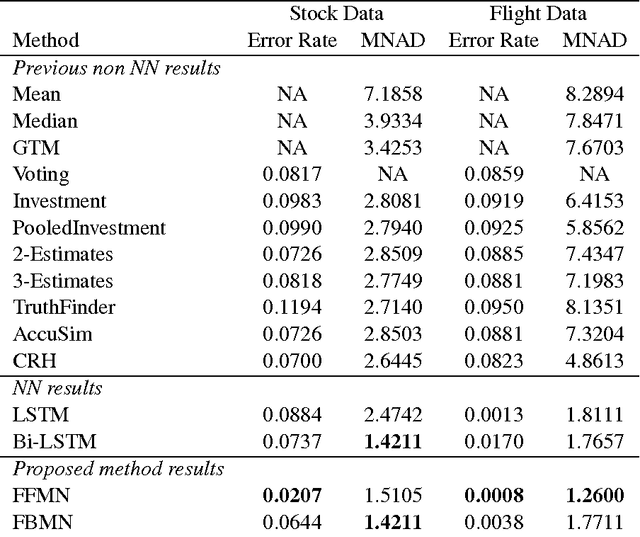
Truth discovery is to resolve conflicts and find the truth from multiple-source statements. Conventional methods mostly research based on the mutual effect between the reliability of sources and the credibility of statements, however, pay no attention to the mutual effect among the credibility of statements about the same object. We propose memory network based models to incorporate these two ideas to do the truth discovery. We use feedforward memory network and feedback memory network to learn the representation of the credibility of statements which are about the same object. Specially, we adopt memory mechanism to learn source reliability and use it through truth prediction. During learning models, we use multiple types of data (categorical data and continuous data) by assigning different weights automatically in the loss function based on their own effect on truth discovery prediction. The experiment results show that the memory network based models much outperform the state-of-the-art method and other baseline methods.