 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-Lightweight Collaborative Mapping for Robot Swarms
Jul 03, 2024



A key requirement in robotics is the ability to simultaneously self-localize and map a previously unknown environment, relying primarily on onboard sensing and computation. Achieving fully onboard accurate simultaneous localization and mapping (SLAM) is feasible for high-end robotic platforms, whereas small and inexpensive robots face challenges due to constrained hardware, therefore frequently resorting to external infrastructure for sensing and computation. The challenge is further exacerbated in swarms of robots, where coordination, scalability, and latency are crucial concerns. This work introduces a decentralized and lightweight collaborative SLAM approach that enables mapping on virtually any robot, even those equipped with low-cost hardware, including miniaturized insect-size devices. Moreover, the proposed solution supports large swarm formations with the capability to coordinate hundreds of agents. To substantiate our claims, we have successfully implemented collaborative SLAM on centimeter-size drones weighing only 46 grams. Remarkably, we achieve results comparable to high-end state-of-the-art solutions while reducing the cost, memory, and computation requirements by two orders of magnitude. Our approach is innovative in three main aspects. First, it enables onboard infrastructure-less collaborative mapping with a lightweight and cost-effective solution in terms of sensing and computation. Second, we optimize the data traffic within the swarm to support hundreds of cooperative agents using standard wireless protocols such as ultra-wideband (UWB), Bluetooth, or WiFi. Last, we implement a distributed swarm coordination policy to decrease mapping latency and enhance accuracy.
Tiny-PULP-Dronets: Squeezing Neural Networks for Faster and Lighter Inference on Multi-Tasking Autonomous Nano-Drones
Jul 02, 2024



Pocket-sized autonomous nano-drones can revolutionize many robotic use cases, such as visual inspection in narrow, constrained spaces, and ensure safer human-robot interaction due to their tiny form factor and weight -- i.e., tens of grams. This compelling vision is challenged by the high level of intelligence needed aboard, which clashes against the limited computational and storage resources available on PULP (parallel-ultra-low-power) MCU class navigation and mission controllers that can be hosted aboard. This work moves from PULP-Dronet, a State-of-the-Art convolutional neural network for autonomous navigation on nano-drones. We introduce Tiny-PULP-Dronet: a novel methodology to squeeze by more than one order of magnitude model size (50x fewer parameters), and number of operations (27x less multiply-and-accumulate) required to run inference with similar flight performance as PULP-Dronet. This massive reduction paves the way towards affordable multi-tasking on nano-drones, a fundamental requirement for achieving high-level intelligence.
Multi-sensory Anti-collision Design for Autonomous Nano-swarm Exploration
Dec 20, 2023This work presents a multi-sensory anti-collision system design to achieve robust autonomous exploration capabilities for a swarm of 10 cm-side nano-drones operating on object detection missions. We combine lightweight single-beam laser ranging to avoid proximity collisions with a long-range vision-based obstacle avoidance deep learning model (i.e., PULP-Dronet) and an ultra-wide-band (UWB) based ranging module to prevent intra-swarm collisions. An in-field study shows that our multisensory approach can prevent collisions with static obstacles, improving the mission success rate from 20% to 80% in cluttered environments w.r.t. a State-of-the-Art (SoA) baseline. At the same time, the UWB-based sub-system shows a 92.8% success rate in preventing collisions between drones of a four-agent fleet within a safety distance of 65 cm. On a SoA robotic platform extended by a GAP8 multi-core processor, the PULP-Dronet runs interleaved with an objected detection task, which constraints its execution at 1.6 frame/s. This throughput is sufficient for avoiding obstacles with a probability of about 40% but shows a need for more capable processors for the next-generation nano-drone swarms.
NanoSLAM: Enabling Fully Onboard SLAM for Tiny Robots
Sep 21, 2023



Perceiving and mapping the surroundings are essential for enabling autonomous navigation in any robotic platform. The algorithm class that enables accurate mapping while correcting the odometry errors present in most robotics systems is Simultaneous Localization and Mapping (SLAM). Today, fully onboard mapping is only achievable on robotic platforms that can host high-wattage processors, mainly due to the significant computational load and memory demands required for executing SLAM algorithms. For this reason, pocket-size hardware-constrained robots offload the execution of SLAM to external infrastructures. To address the challenge of enabling SLAM algorithms on resource-constrained processors, this paper proposes NanoSLAM, a lightweight and optimized end-to-end SLAM approach specifically designed to operate on centimeter-size robots at a power budget of only 87.9 mW. We demonstrate the mapping capabilities in real-world scenarios and deploy NanoSLAM on a nano-drone weighing 44 g and equipped with a novel commercial RISC-V low-power parallel processor called GAP9. The algorithm is designed to leverage the parallel capabilities of the RISC-V processing cores and enables mapping of a general environment with an accuracy of 4.5 cm and an end-to-end execution time of less than 250 ms.
Fully Onboard SLAM for Distributed Mapping with a Swarm of Nano-Drones
Sep 07, 2023The use of Unmanned Aerial Vehicles (UAVs) is rapidly increasing in applications ranging from surveillance and first-aid missions to industrial automation involving cooperation with other machines or humans. To maximize area coverage and reduce mission latency, swarms of collaborating drones have become a significant research direction. However, this approach requires open challenges in positioning, mapping, and communications to be addressed. This work describes a distributed mapping system based on a swarm of nano-UAVs, characterized by a limited payload of 35 g and tightly constrained on-board sensing and computing capabilities. Each nano-UAV is equipped with four 64-pixel depth sensors that measure the relative distance to obstacles in four directions. The proposed system merges the information from the swarm and generates a coherent grid map without relying on any external infrastructure. The data fusion is performed using the iterative closest point algorithm and a graph-based simultaneous localization and mapping algorithm, running entirely on-board the UAV's low-power ARM Cortex-M microcontroller with just 192 kB of SRAM memory. Field results gathered in three different mazes from a swarm of up to 4 nano-UAVs prove a mapping accuracy of 12 cm and demonstrate that the mapping time is inversely proportional to the number of agents. The proposed framework scales linearly in terms of communication bandwidth and on-board computational complexity, supporting communication between up to 20 nano-UAVs and mapping of areas up to 180 m2 with the chosen configuration requiring only 50 kB of memory.
Land & Localize: An Infrastructure-free and Scalable Nano-Drones Swarm with UWB-based Localization
Jul 17, 2023



Relative localization is a crucial functional block of any robotic swarm. We address it in a fleet of nano-drones characterized by a 10 cm-scale form factor, which makes them highly versatile but also strictly limited in their onboard power envelope. State-of-the-Art solutions leverage Ultra-WideBand (UWB) technology, allowing distance range measurements between peer nano-drones and a stationary infrastructure of multiple UWB anchors. Therefore, we propose an UWB-based infrastructure-free nano-drones swarm, where part of the fleet acts as dynamic anchors, i.e., anchor-drones (ADs), capable of automatic deployment and landing. By varying the Ads' position constraint, we develop three alternative solutions with different trade-offs between flexibility and localization accuracy. In-field results, with four flying mission-drones (MDs), show a localization root mean square error (RMSE) spanning from 15.3 cm to 27.8 cm, at most. Scaling the number of MDs from 4 to 8, the RMSE marginally increases, i.e., less than 10 cm at most. The power consumption of the MDs' UWB module amounts to 342 mW. Ultimately, compared to a fixed-infrastructure commercial solution, our infrastructure-free system can be deployed anywhere and rapidly by taking 5.7 s to self-localize 4 ADs with a localization RMSE of up to 12.3% in the most challenging case with 8 MDs.
Robust and Efficient Depth-based Obstacle Avoidance for Autonomous Miniaturized UAVs
Aug 26, 2022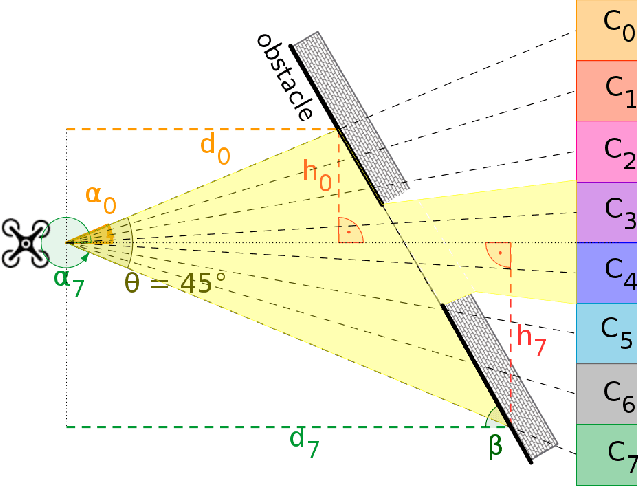
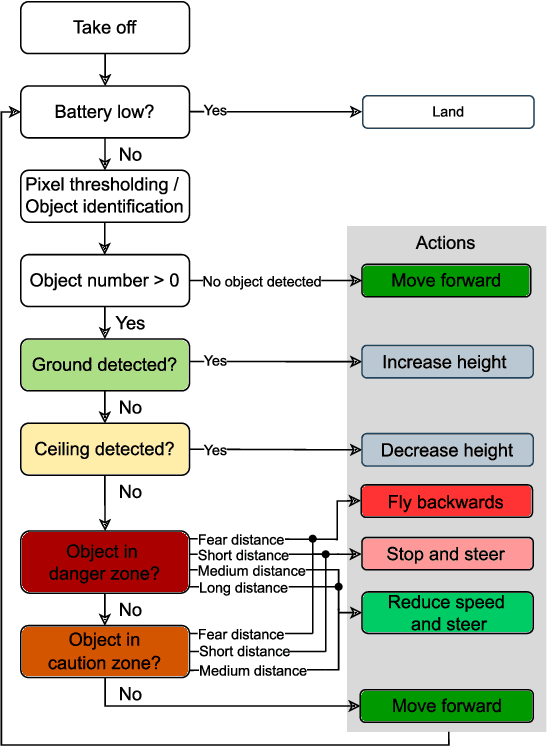
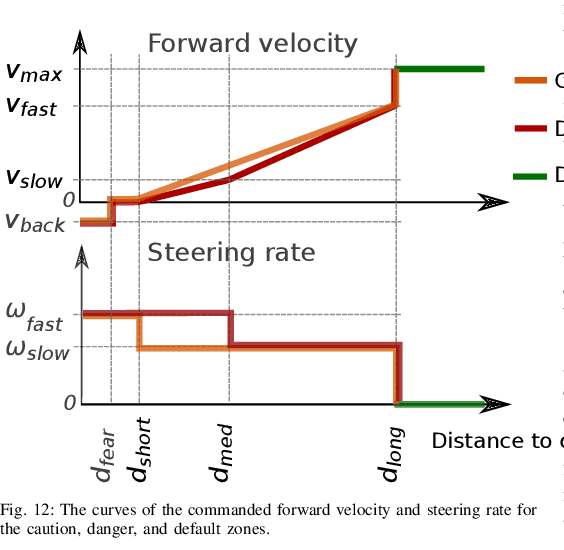
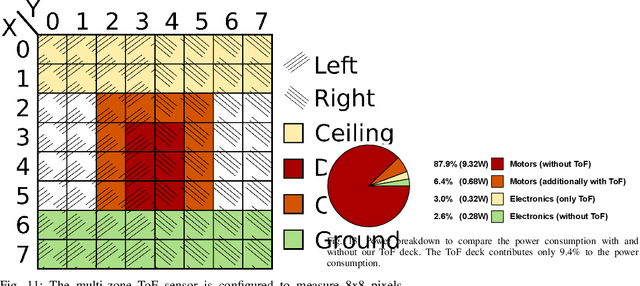
Nano-size drones hold enormous potential to explore unknown and complex environments. Their small size makes them agile and safe for operation close to humans and allows them to navigate through narrow spaces. However, their tiny size and payload restrict the possibilities for on-board computation and sensing, making fully autonomous flight extremely challenging. The first step towards full autonomy is reliable obstacle avoidance, which has proven to be technically challenging by itself in a generic indoor environment. Current approaches utilize vision-based or 1-dimensional sensors to support nano-drone perception algorithms. This work presents a lightweight obstacle avoidance system based on a novel millimeter form factor 64 pixels multi-zone Time-of-Flight (ToF) sensor and a generalized model-free control policy. Reported in-field tests are based on the Crazyflie 2.1, extended by a custom multi-zone ToF deck, featuring a total flight mass of 35g. The algorithm only uses 0.3% of the on-board processing power (210uS execution time) with a frame rate of 15fps, providing an excellent foundation for many future applications. Less than 10% of the total drone power is needed to operate the proposed perception system, including both lifting and operating the sensor. The presented autonomous nano-size drone reaches 100% reliability at 0.5m/s in a generic and previously unexplored indoor environment. The proposed system is released open-source with an extensive dataset including ToF and gray-scale camera data, coupled with UAV position ground truth from motion capture.
Leveraging Tactile Sensors for Low Latency Embedded Smart Hands for Prosthetic and Robotic Applications
Mar 28, 2022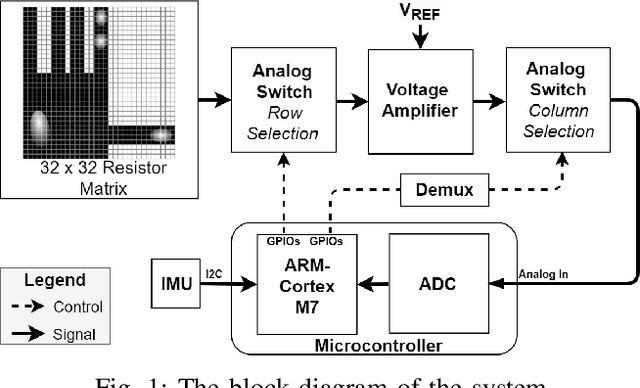
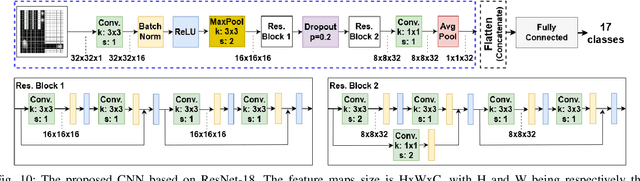
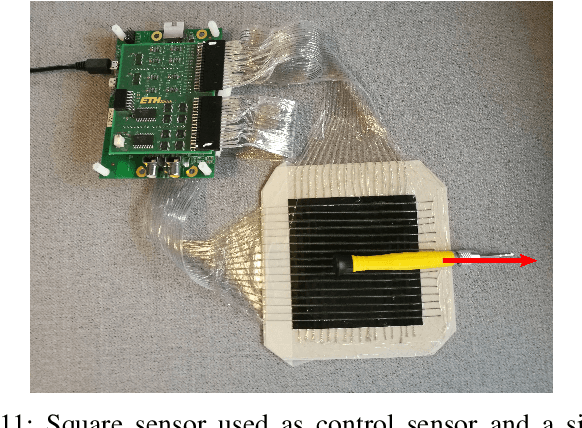
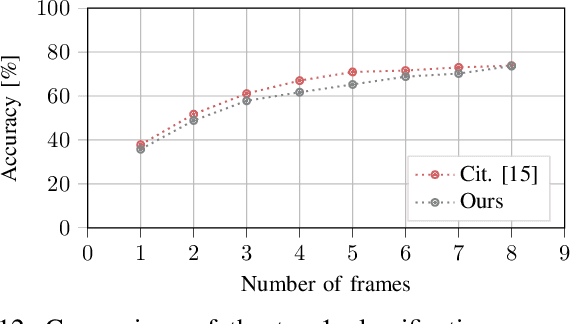
Tactile sensing is a crucial perception mode for robots and human amputees in need of controlling a prosthetic device. Today robotic and prosthetic systems are still missing the important feature of accurate tactile sensing. This lack is mainly due to the fact that the existing tactile technologies have limited spatial and temporal resolution and are either expensive or not scalable. In this paper, we present the design and the implementation of a hardware-software embedded system called SmartHand. It is specifically designed to enable the acquisition and the real-time processing of high-resolution tactile information from a hand-shaped multi-sensor array for prosthetic and robotic applications. During data collection, our system can deliver a high throughput of 100 frames per second, which is 13.7x higher than previous related work. We collected a new tactile dataset while interacting with daily-life objects during five different sessions. We propose a compact yet accurate convolutional neural network that requires one order of magnitude less memory and 15.6x fewer computations compared to related work without degrading classification accuracy. The top-1 and top-3 cross-validation accuracies are respectively 98.86% and 99.83%. We further analyze the inter-session variability and obtain the best top-3 leave-one-out-validation accuracy of 77.84%. We deploy the trained model on a high-performance ARM Cortex-M7 microcontroller achieving an inference time of only 100 ms minimizing the response latency. The overall measured power consumption is 505 mW. Finally, we fabricate a new control sensor and perform additional experiments to provide analyses on sensor degradation and slip detection. This work is a step forward in giving robotic and prosthetic devices a sense of touch and demonstrates the practicality of a smart embedded system empowered by tiny machine learning.
SmartHand: Towards Embedded Smart Hands for Prosthetic and Robotic Applications
Jul 23, 2021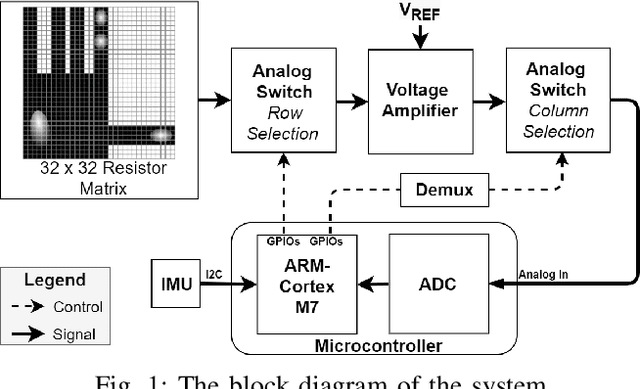
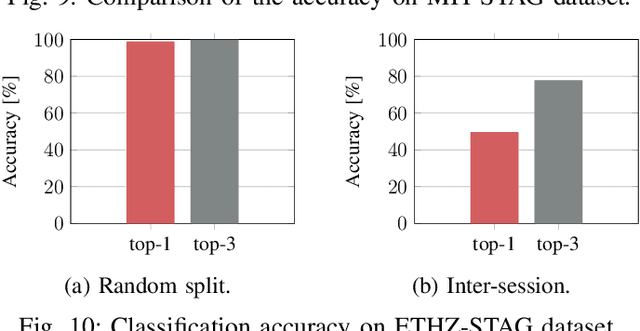
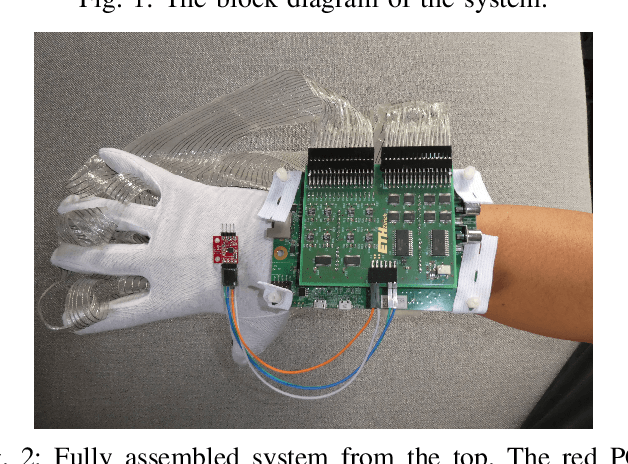
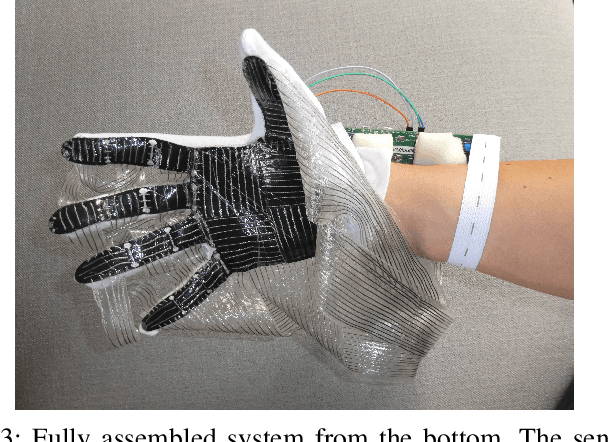
The sophisticated sense of touch of the human hand significantly contributes to our ability to safely, efficiently, and dexterously manipulate arbitrary objects in our environment. Robotic and prosthetic devices lack refined, tactile feedback from their end-effectors, leading to counterintuitive and complex control strategies. To address this lack, tactile sensors have been designed and developed, but they often offer an insufficient spatial and temporal resolution. This paper focuses on overcoming these issues by designing a smart embedded system, called SmartHand, enabling the acquisition and real-time processing of high-resolution tactile information from a hand-shaped multi-sensor array for prosthetic and robotic applications. We acquire a new tactile dataset consisting of 340,000 frames while interacting with 16 everyday objects and the empty hand, i.e., a total of 17 classes. The design of the embedded system minimizes response latency in classification, by deploying a small yet accurate convolutional neural network on a high-performance ARM Cortex-M7 microcontroller. Compared to related work, our model requires one order of magnitude less memory and 15.6x fewer computations while achieving similar inter-session accuracy and up to 98.86% and 99.83% top-1 and top-3 cross-validation accuracy, respectively. Experimental results show a total power consumption of 505mW and a latency of only 100ms.