 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Domain Object Detection Using Unsupervised Image Translation
Jan 16, 2026Unsupervised domain adaptation for object detection addresses the adaption of detectors trained in a source domain to work accurately in an unseen target domain. Recently, methods approaching the alignment of the intermediate features proven to be promising, achieving state-of-the-art results. However, these methods are laborious to implement and hard to interpret. Although promising, there is still room for improvements to close the performance gap toward the upper-bound (when training with the target data). In this work, we propose a method to generate an artificial dataset in the target domain to train an object detector. We employed two unsupervised image translators (CycleGAN and an AdaIN-based model) using only annotated data from the source domain and non-annotated data from the target domain. Our key contributions are the proposal of a less complex yet more effective method that also has an improved interpretability. Results on real-world scenarios for autonomous driving show significant improvements, outperforming state-of-the-art methods in most cases, further closing the gap toward the upper-bound.
Cross-Domain Car Detection Using Unsupervised Image-to-Image Translation: From Day to Night
Jul 19, 2019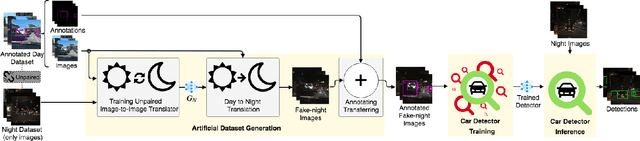
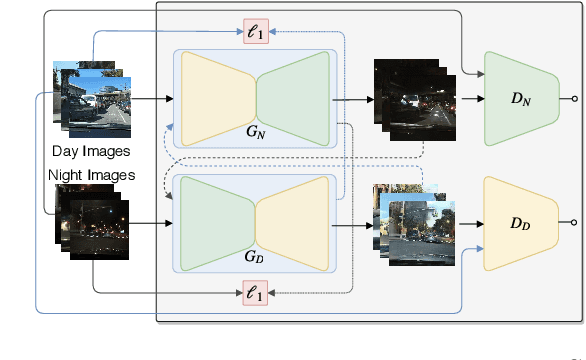

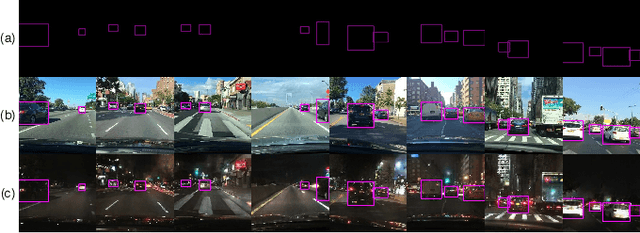
Deep learning techniques have enabled the emergence of state-of-the-art models to address object detection tasks. However, these techniques are data-driven, delegating the accuracy to the training dataset which must resemble the images in the target task. The acquisition of a dataset involves annotating images, an arduous and expensive process, generally requiring time and manual effort. Thus, a challenging scenario arises when the target domain of application has no annotated dataset available, making tasks in such situation to lean on a training dataset of a different domain. Sharing this issue, object detection is a vital task for autonomous vehicles where the large amount of driving scenarios yields several domains of application requiring annotated data for the training process. In this work, a method for training a car detection system with annotated data from a source domain (day images) without requiring the image annotations of the target domain (night images) is presented. For that, a model based on Generative Adversarial Networks (GANs) is explored to enable the generation of an artificial dataset with its respective annotations. The artificial dataset (fake dataset) is created translating images from day-time domain to night-time domain. The fake dataset, which comprises annotated images of only the target domain (night images), is then used to train the car detector model. Experimental results showed that the proposed method achieved significant and consistent improvements, including the increasing by more than 10% of the detection performance when compared to the training with only the available annotated data (i.e., day images).