 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Many Trees in a Random Forest? A Revisited Approach with Plateau Search and Optuna Integration
Jun 02, 2026Hyperparameter optimization (HPO) for Random Forest faces a specific difficulty in tuning the number of trees: the predictive score typically improves monotonically with ensemble size, so standard methods such as Tree-structured Parzen Estimator (TPE) and Hyperband require a predefined search range and often drive the estimate toward its right boundary. Early-stopping strategies avoid fixing such a range, but can be sensitive to score noise and prone to premature stopping. To address this, we propose an integrated triplet-based plateau-search algorithm that removes the number of trees from the direct TPE search space and still exploits information accumulated across HPO trials. The method adaptively tracks a near-minimal sufficient ensemble size by monitoring relative changes in the out-of-bag (OOB) score across a triplet of forest sizes and shifting this triplet accordingly. This yields an automated and user-interpretable procedure based on a tolerance parameter. We also provide a theoretical analysis: we relate the proposed relative OOB-score criterion to the gap between the current and limiting scores, and derive an asymptotic variance estimate for the corresponding OOB-based absolute relative difference. Experiments show that the selected number of trees can differ substantially from the common heuristic: for most classical benchmark datasets it is smaller, whereas for some high-dimensional bioinformatics datasets, such as Arcene and Dorothea, it is larger. The source code and reproducible experiments are available at https://github.com/lange-am/rf_plateau_hpo.
Position of Uncertainty: A Cross-Linguistic Study of Positional Bias in Large Language Models
May 22, 2025Large language models exhibit positional bias -- systematic neglect of information at specific context positions -- yet its interplay with linguistic diversity remains poorly understood. We present a cross-linguistic study across five typologically distinct languages (English, Russian, German, Hindi, Vietnamese), examining how positional bias interacts with model uncertainty, syntax, and prompting. Key findings: (1) Positional bias is model-driven, with language-specific variations -- Qwen2.5-7B favors late positions, challenging assumptions of early-token bias; (2) Explicit positional guidance (e.g., correct context is at position X) reduces accuracy across languages, undermining prompt-engineering practices; (3) Aligning context with positional bias increases entropy, yet minimal entropy does not predict accuracy. (4) We further uncover that LLMs differently impose dominant word order in free-word-order languages like Hindi.
Revising deep learning methods in parking lot occupancy detection
Jun 08, 2023Parking guidance systems have recently become a popular trend as a part of the smart cities' paradigm of development. The crucial part of such systems is the algorithm allowing drivers to search for available parking lots across regions of interest. The classic approach to this task is based on the application of neural network classifiers to camera records. However, existing systems demonstrate a lack of generalization ability and appropriate testing regarding specific visual conditions. In this study, we extensively evaluate state-of-the-art parking lot occupancy detection algorithms, compare their prediction quality with the recently emerged vision transformers, and propose a new pipeline based on EfficientNet architecture. Performed computational experiments have demonstrated the performance increase in the case of our model, which was evaluated on 5 different datasets.
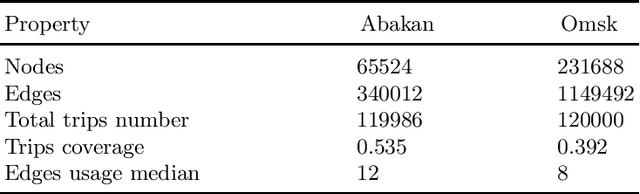
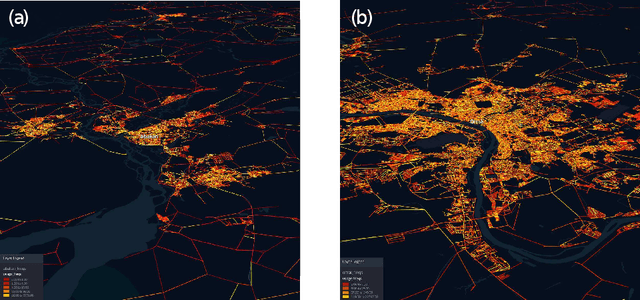
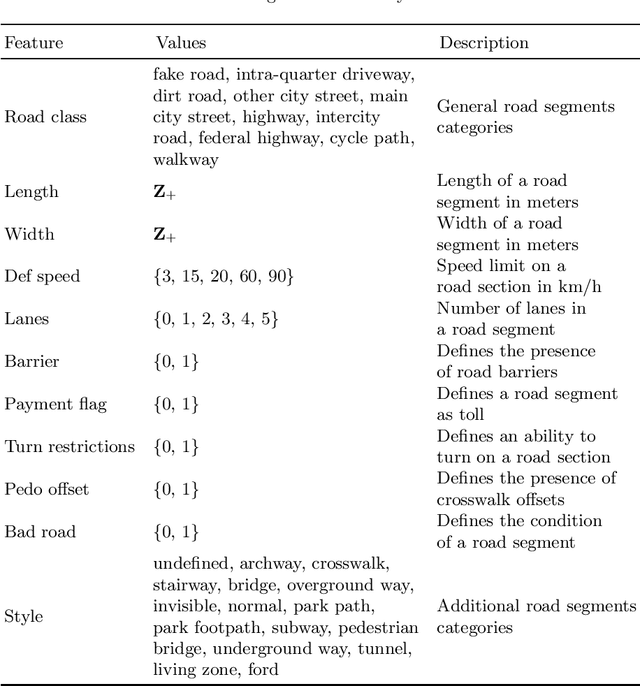
GCT-TTE: Graph Convolutional Transformer for Travel Time Estimation
Jun 07, 2023This paper introduces a new transformer-based model for the problem of travel time estimation. The key feature of the proposed GCT-TTE architecture is the utilization of different data modalities capturing different properties of an input path. Along with the extensive study regarding the model configuration, we implemented and evaluated a sufficient number of actual baselines for path-aware and path-blind settings. The conducted computational experiments have confirmed the viability of our pipeline, which outperformed state-of-the-art models on both considered datasets. Additionally, GCT-TTE was deployed as a web service accessible for further experiments with user-defined routes.
Transformer-based classification of premise in tweets related to COVID-19
Sep 08, 2022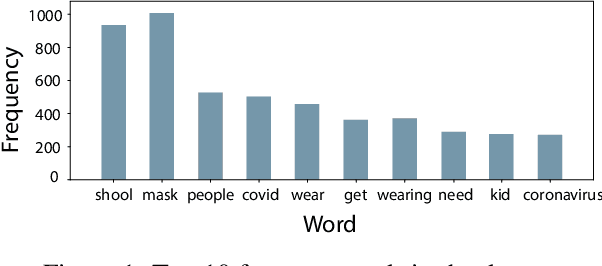
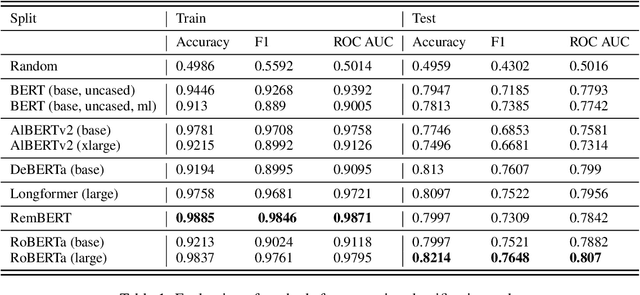
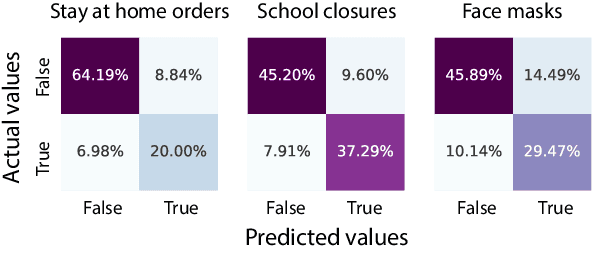
Automation of social network data assessment is one of the classic challenges of natural language processing. During the COVID-19 pandemic, mining people's stances from public messages have become crucial regarding understanding attitudes towards health orders. In this paper, the authors propose the predictive model based on transformer architecture to classify the presence of premise in Twitter texts. This work is completed as part of the Social Media Mining for Health (SMM4H) Workshop 2022. We explored modern transformer-based classifiers in order to construct the pipeline efficiently capturing tweets semantics. Our experiments on a Twitter dataset showed that RoBERTa is superior to the other transformer models in the case of the premise prediction task. The model achieved competitive performance with respect to ROC AUC value 0.807, and 0.7648 for the F1 score.
Logistics, Graphs, and Transformers: Towards improving Travel Time Estimation
Jul 12, 2022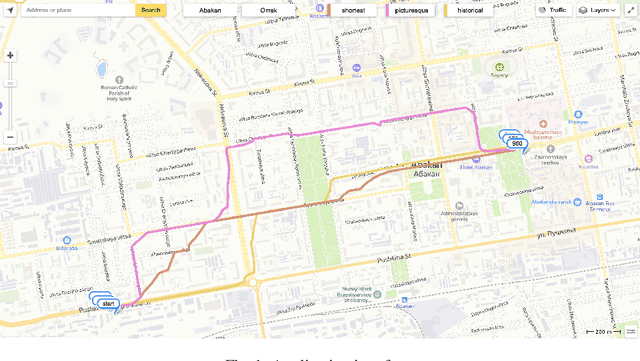
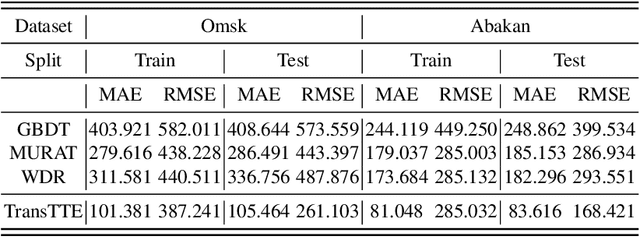
The problem of travel time estimation is widely considered as the fundamental challenge of modern logistics. The complex nature of interconnections between spatial aspects of roads and temporal dynamics of ground transport still preserves an area to experiment with. However, the total volume of currently accumulated data encourages the construction of the learning models which have the perspective to significantly outperform earlier solutions. In order to address the problems of travel time estimation, we propose a new method based on transformer architecture - TransTTE.
Citation network applications in a scientific co-authorship recommender system
Nov 22, 2021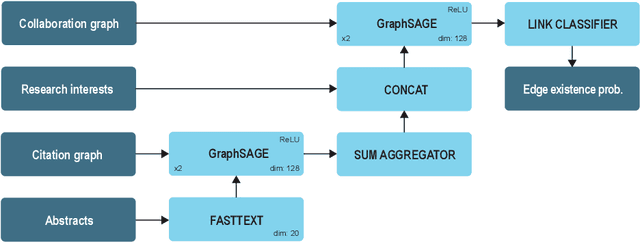
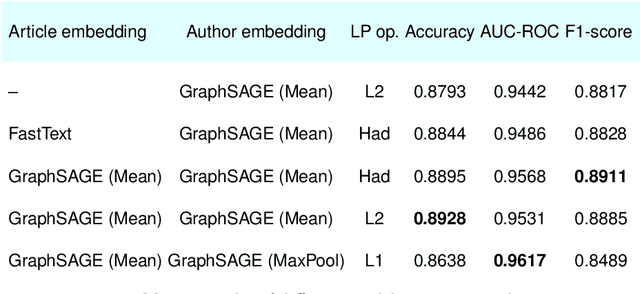
The problem of co-authors selection in the area of scientific collaborations might be a daunting one. In this paper, we propose a new pipeline that effectively utilizes citation data in the link prediction task on the co-authorship network. In particular, we explore the capabilities of a recommender system based on data aggregation strategies on different graphs. Since graph neural networks proved their efficiency on a wide range of tasks related to recommendation systems, we leverage them as a relevant method for the forecasting of potential collaborations in the scientific community.
Hybrid Graph Embedding Techniques in Estimated Time of Arrival Task
Oct 08, 2021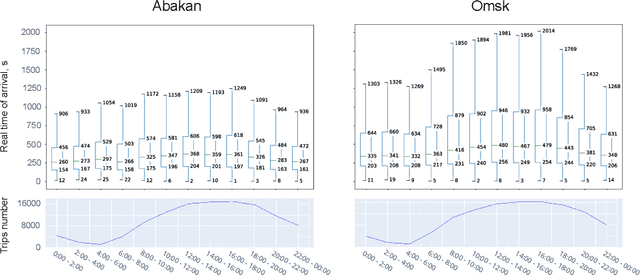
Recently, deep learning has achieved promising results in the calculation of Estimated Time of Arrival (ETA), which is considered as predicting the travel time from the start point to a certain place along a given path. ETA plays an essential role in intelligent taxi services or automotive navigation systems. A common practice is to use embedding vectors to represent the elements of a road network, such as road segments and crossroads. Road elements have their own attributes like length, presence of crosswalks, lanes number, etc. However, many links in the road network are traversed by too few floating cars even in large ride-hailing platforms and affected by the wide range of temporal events. As the primary goal of the research, we explore the generalization ability of different spatial embedding strategies and propose a two-stage approach to deal with such problems.