 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon Holonomic Collision Avoidance of Dynamic Obstacles under Non-Parametric Uncertainty: A Hilbert Space Approach
Jan 02, 2022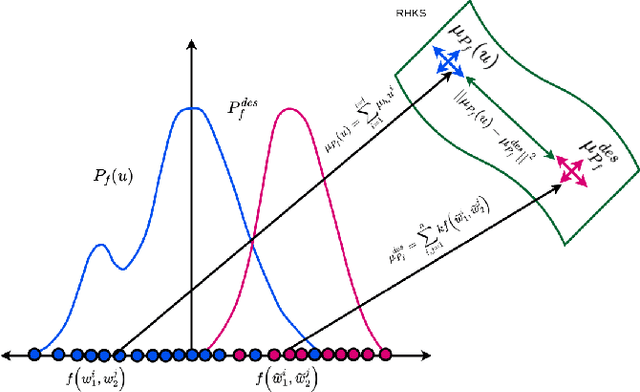
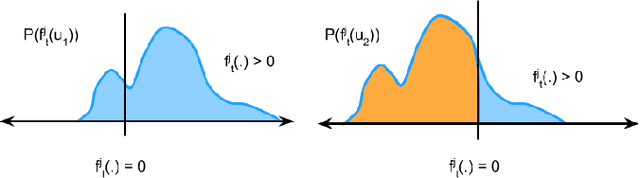
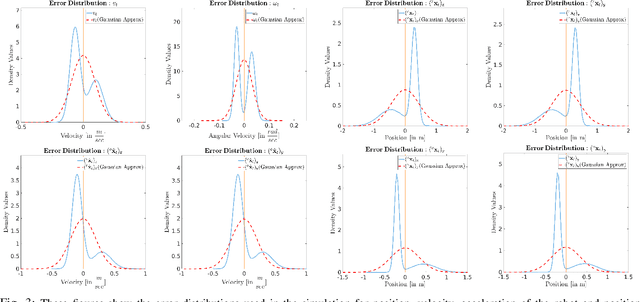
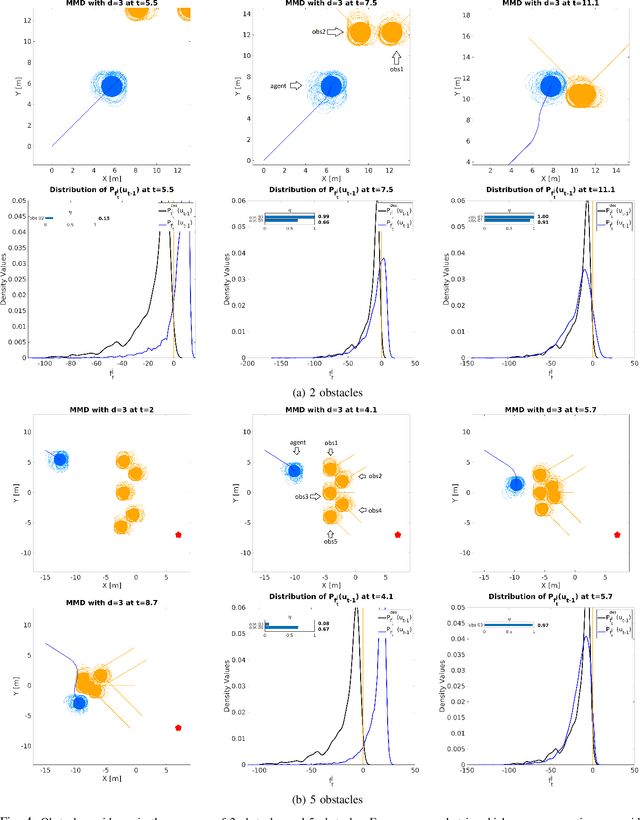
We consider the problem of an agent/robot with non-holonomic kinematics avoiding many dynamic obstacles. State and velocity noise of both the robot and obstacles as well as the robot's control noise are modelled as non-parametric distributions as often the Gaussian assumptions of noise models are violated in real-world scenarios. Under these assumptions, we formulate a robust MPC that samples robotic controls effectively in a manner that aligns the robot to the goal state while avoiding obstacles under the duress of such non-parametric noise. In particular, the MPC incorporates a distribution matching cost that effectively aligns the distribution of the current collision cone to a certain desired distribution whose samples are collision-free. This cost is posed as a distance function in the Hilbert Space, whose minimization typically results in the collision cone samples becoming collision-free. We compare and show tangible performance gain with methods that model the collision cone distribution by linearizing the Gaussian approximations of the original non-parametric state and obstacle distributions. We also show superior performance with methods that pose a chance constraint formulation of the Gaussian approximations of non-parametric noise without subjecting such approximations to further linearizations. The performance gain is shown both in terms of trajectory length and control costs that vindicates the efficacy of the proposed method. To the best of our knowledge, this is the first presentation of non-holonomic collision avoidance of moving obstacles in the presence of non-parametric state, velocity and actuator noise models.
Grounding Linguistic Commands to Navigable Regions
Dec 24, 2021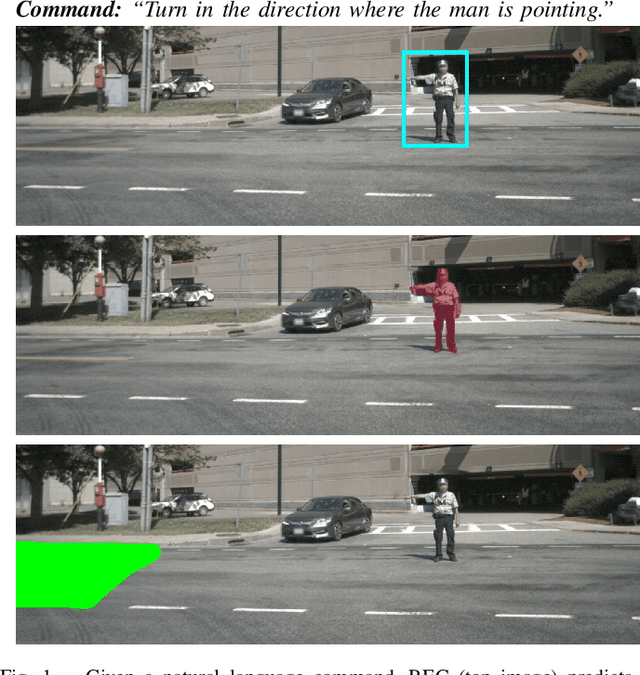
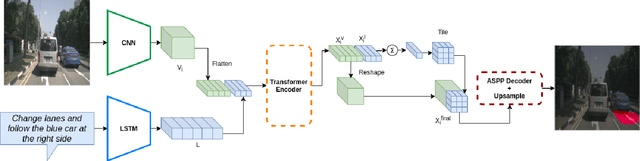
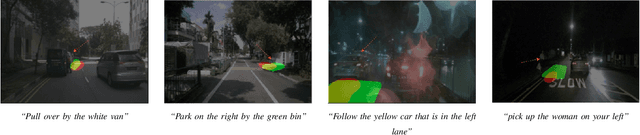
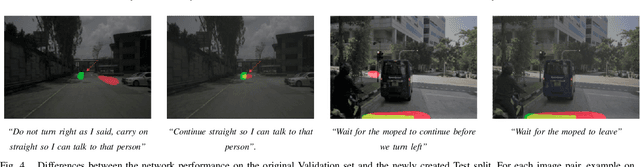
Humans have a natural ability to effortlessly comprehend linguistic commands such as "park next to the yellow sedan" and instinctively know which region of the road the vehicle should navigate. Extending this ability to autonomous vehicles is the next step towards creating fully autonomous agents that respond and act according to human commands. To this end, we propose the novel task of Referring Navigable Regions (RNR), i.e., grounding regions of interest for navigation based on the linguistic command. RNR is different from Referring Image Segmentation (RIS), which focuses on grounding an object referred to by the natural language expression instead of grounding a navigable region. For example, for a command "park next to the yellow sedan," RIS will aim to segment the referred sedan, and RNR aims to segment the suggested parking region on the road. We introduce a new dataset, Talk2Car-RegSeg, which extends the existing Talk2car dataset with segmentation masks for the regions described by the linguistic commands. A separate test split with concise manoeuvre-oriented commands is provided to assess the practicality of our dataset. We benchmark the proposed dataset using a novel transformer-based architecture. We present extensive ablations and show superior performance over baselines on multiple evaluation metrics. A downstream path planner generating trajectories based on RNR outputs confirms the efficacy of the proposed framework.
Cosine meets Softmax: A tough-to-beat baseline for visual grounding
Sep 13, 2020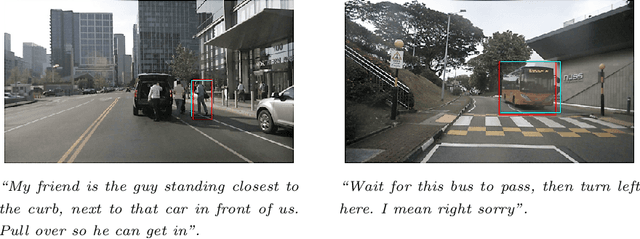
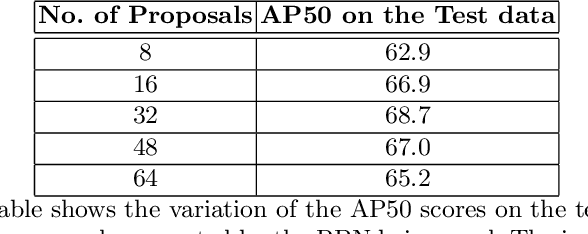
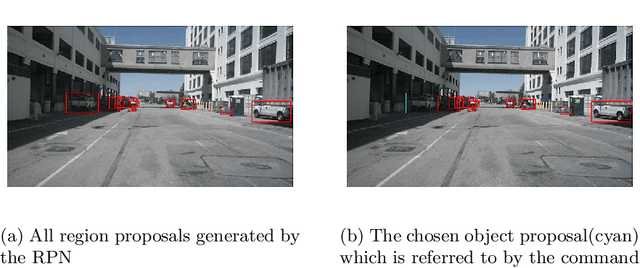
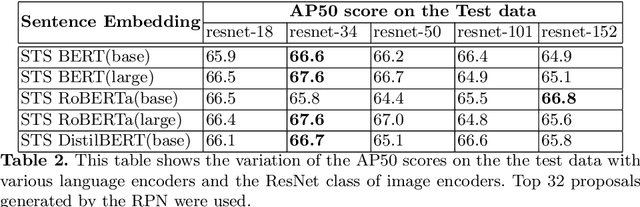
In this paper, we present a simple baseline for visual grounding for autonomous driving which outperforms the state of the art methods, while retaining minimal design choices. Our framework minimizes the cross-entropy loss over the cosine distance between multiple image ROI features with a text embedding (representing the give sentence/phrase). We use pre-trained networks for obtaining the initial embeddings and learn a transformation layer on top of the text embedding. We perform experiments on the Talk2Car dataset and achieve 68.7% AP50 accuracy, improving upon the previous state of the art by 8.6%. Our investigation suggests reconsideration towards more approaches employing sophisticated attention mechanisms or multi-stage reasoning or complex metric learning loss functions by showing promise in simpler alternatives.
SVM Enhanced Frenet Frame Planner For Safe Navigation Amidst Moving Agents
Jul 02, 2019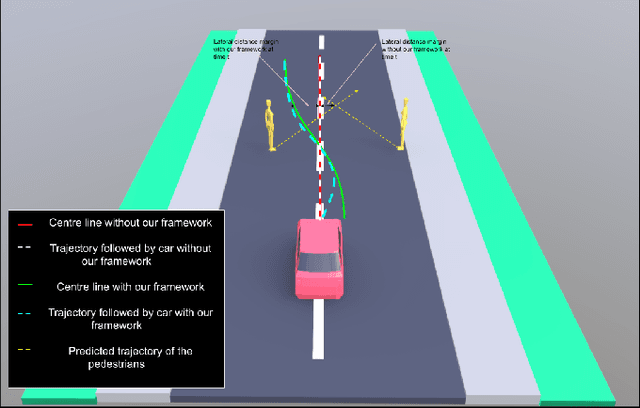
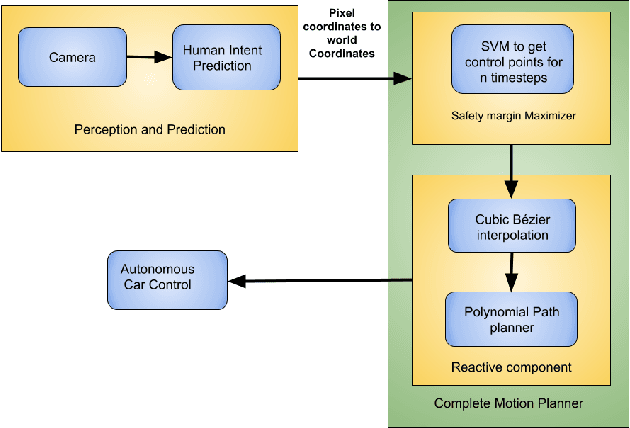
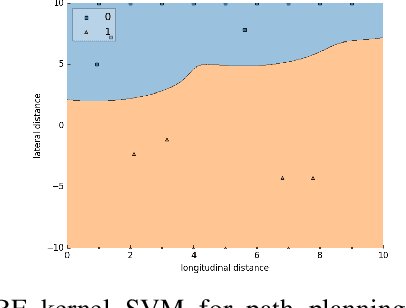
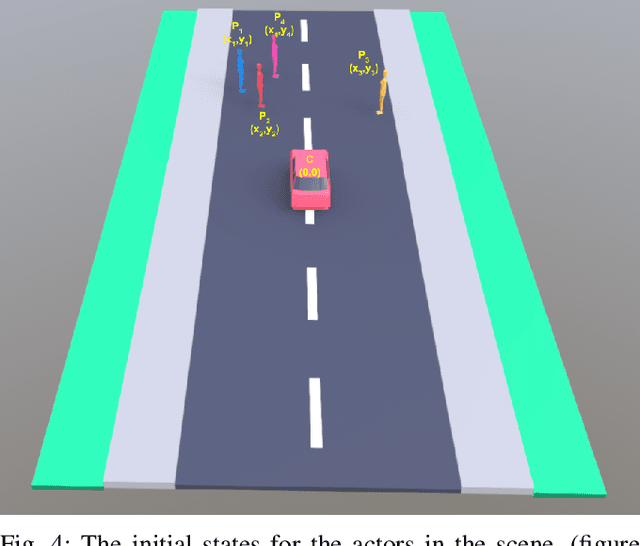
This paper proposes an SVM Enhanced Trajectory Planner for dynamic scenes, typically those encountered in on road settings. Frenet frame based trajectory generation is popular in the context of autonomous driving both in research and industry. We incorporate a safety based maximal margin criteria using a SVM layer that generates control points that are maximally separated from all dynamic obstacles in the scene. A kinematically consistent trajectory generator then computes a path through these waypoints. We showcase through simulations as well as real world experiments on a self driving car that the SVM enhanced planner provides for a larger offset with dynamic obstacles than the regular Frenet frame based trajectory generation. Thereby, the authors argue that such a formulation is inherently suited for navigation amongst pedestrians. We assume the availability of an intent or trajectory prediction module that predicts the future trajectories of all dynamic actors in the scene.