 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapidly Converging Time-Discounted Ergodicity on Graphs for Active Inspection of Confined Spaces
Mar 13, 2025



Ergodic exploration has spawned a lot of interest in mobile robotics due to its ability to design time trajectories that match desired spatial coverage statistics. However, current ergodic approaches are for continuous spaces, which require detailed sensory information at each point and can lead to fractal-like trajectories that cannot be tracked easily. This paper presents a new ergodic approach for graph-based discretization of continuous spaces. It also introduces a new time-discounted ergodicity metric, wherein early visitations of information-rich nodes are weighted more than late visitations. A Markov chain synthesized using a convex program is shown to converge more rapidly to time-discounted ergodicity than the traditional fastest mixing Markov chain. The resultant ergodic traversal method is used within a hierarchical framework for active inspection of confined spaces with the goal of detecting anomalies robustly using SLAM-driven Bayesian hypothesis testing. Both simulation and physical experiments on a ground robot show the advantages of this framework over greedy and random exploration methods for left-behind foreign object debris detection in a ballast tank.
Safe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability Analysis
Oct 01, 2024



Marine robots must maintain precise control and ensure safety during tasks like ocean monitoring, even when encountering unpredictable disturbances that affect performance. Designing algorithms for uncrewed surface vehicles (USVs) requires accounting for these disturbances to control the vehicle and ensure it avoids obstacles. While adaptive control has addressed USV control challenges, real-world applications are limited, and certifying USV safety amidst unexpected disturbances remains difficult. To tackle control issues, we employ a model reference adaptive controller (MRAC) to stabilize the USV along a desired trajectory. For safety certification, we developed a reachability module with a moving horizon estimator (MHE) to estimate disturbances affecting the USV. This estimate is propagated through a forward reachable set calculation, predicting future states and enabling real-time safety certification. We tested our safe autonomy pipeline on a Clearpath Heron USV in the Charles River, near MIT. Our experiments demonstrated that the USV's MRAC controller and reachability module could adapt to disturbances like thruster failures and drag forces. The MRAC controller outperformed a PID baseline, showing a 45%-81% reduction in RMSE position error. Additionally, the reachability module provided real-time safety certification, ensuring the USV's safety. We further validated our pipeline's effectiveness in underway replenishment and canal scenarios, simulating relevant marine tasks.
Adaptive bias for dissensus in nonlinear opinion dynamics with application to evolutionary division of labor games
Sep 21, 2024



This paper addresses the problem of adaptively controlling the bias parameter in nonlinear opinion dynamics (NOD) to allocate agents into groups of arbitrary sizes for the purpose of maximizing collective rewards. In previous work, an algorithm based on the coupling of NOD with an multi-objective behavior optimization was successfully deployed as part of a multi-robot system in an autonomous task allocation field experiment. Motivated by the field results, in this paper we propose and analyze a new task allocation model that synthesizes NOD with an evolutionary game framework. We prove sufficient conditions under which it is possible to control the opinion state in the group to a desired allocation of agents between two tasks through an adaptive bias using decentralized feedback. We then verify the theoretical results with a simulation study of a collaborative evolutionary division of labor game.
A Model for Multi-Agent Autonomy That Uses Opinion Dynamics and Multi-Objective Behavior Optimization
Nov 18, 2023



This paper reports a new hierarchical architecture for modeling autonomous multi-robot systems (MRSs): a non-linear dynamical opinion process is used to model high-level group choice, and multi-objective behavior optimization is used to model individual decisions. Using previously reported theoretical results, we show it is possible to design the behavior of the MRS by the selection of a relatively small set of parameters. The resulting behavior - both collective actions and individual actions - can be understood intuitively. The approach is entirely decentralized and the communication cost scales by the number of group options, not agents. We demonstrated the effectiveness of this approach using a hypothetical `explore-exploit-migrate' scenario in a two hour field demonstration with eight unmanned surface vessels (USVs). The results from our preliminary field experiment show the collective behavior is robust even with time-varying network topology and agent dropouts.
Active Anomaly Detection in Confined Spaces Using Ergodic Traversal of Directed Region Graphs
Oct 01, 2023



We provide the first step toward developing a hierarchical control-estimation framework to actively plan robot trajectories for anomaly detection in confined spaces. The space is represented globally using a directed region graph, where a region is a landmark that needs to be visited (inspected). We devise a fast mixing Markov chain to find an ergodic route that traverses this graph so that the region visitation frequency is proportional to its anomaly detection uncertainty, while satisfying the edge directionality (region transition) constraint(s). Preliminary simulation results show fast convergence to the ergodic solution and confident estimation of the presence of anomalies in the inspected regions.
An ensemble of online estimation methods for one degree-of-freedom models of unmanned surface vehicles: applied theory and preliminary field results with eight vehicles
Aug 03, 2023In this paper we report an experimental evaluation of three popular methods for online system identification of unmanned surface vehicles (USVs) which were implemented as an ensemble: certifiably stable shallow recurrent neural network (RNN), adaptive identification (AID), and recursive least squares (RLS). The algorithms were deployed on eight USVs for a total of 30 hours of online estimation. During online training the loss function for the RNN was augmented to include a cost for violating a sufficient condition for the RNN to be stable in the sense of contraction stability. Additionally we described an efficient method to calculate the equilibrium points of the RNN and classify the associated stability properties about these points. We found the AID method had lowest mean absolute error in the online prediction setting, but a weighted ensemble had lower error in offline processing.
Human-Assisted Robotic Detection of Foreign Object Debris Inside Confined Spaces of Marine Vessels Using Probabilistic Mapping
Jul 01, 2022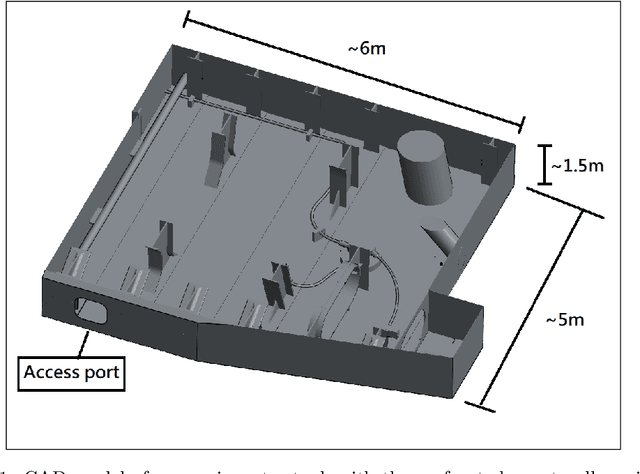

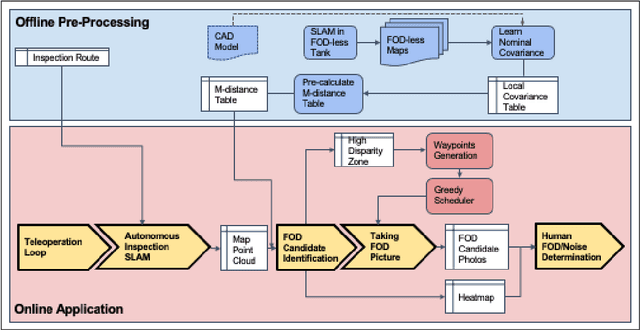

Many complex vehicular systems, such as large marine vessels, contain confined spaces like water tanks, which are critical for the safe functioning of the vehicles. It is particularly hazardous for humans to inspect such spaces due to limited accessibility, poor visibility, and unstructured configuration. While robots provide a viable alternative, they encounter the same set of challenges in realizing robust autonomy. In this work, we specifically address the problem of detecting foreign object debris (FODs) left inside the confined spaces using a visual mapping-based system that relies on Mahalanobis distance-driven comparisons between the nominal and online maps for local outlier identification. Simulation trials show extremely high recall but low precision for the outlier identification method. The assistance of remote humans is, therefore, taken to deal with the precision problem by going over the close-up robot camera images of the outlier regions. An online survey is conducted to show the usefulness of this assistance process. Physical experiments are also reported on a GPU-enabled mobile robot platform inside a scaled-down, prototype tank to demonstrate the feasibility of the FOD detection system.