 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Canada to Japan: How 10,000 km Affect User Perception in Robot Teleoperation
Aug 07, 2025Robot teleoperation (RTo) has emerged as a viable alternative to local control, particularly when human intervention is still necessary. This research aims to study the distance effect on user perception in RTo, exploring the potential of teleoperated robots for older adult care. We propose an evaluation of non-expert users' perception of long-distance RTo, examining how their perception changes before and after interaction, as well as comparing it to that of locally operated robots. We have designed a specific protocol consisting of multiple questionnaires, along with a dedicated software architecture using the Robotics Operating System (ROS) and Unity. The results revealed no statistically significant differences between the local and remote robot conditions, suggesting that robots may be a viable alternative to traditional local control.
TACT: Humanoid Whole-body Contact Manipulation through Deep Imitation Learning with Tactile Modality
Jun 18, 2025Manipulation with whole-body contact by humanoid robots offers distinct advantages, including enhanced stability and reduced load. On the other hand, we need to address challenges such as the increased computational cost of motion generation and the difficulty of measuring broad-area contact. We therefore have developed a humanoid control system that allows a humanoid robot equipped with tactile sensors on its upper body to learn a policy for whole-body manipulation through imitation learning based on human teleoperation data. This policy, named tactile-modality extended ACT (TACT), has a feature to take multiple sensor modalities as input, including joint position, vision, and tactile measurements. Furthermore, by integrating this policy with retargeting and locomotion control based on a biped model, we demonstrate that the life-size humanoid robot RHP7 Kaleido is capable of achieving whole-body contact manipulation while maintaining balance and walking. Through detailed experimental verification, we show that inputting both vision and tactile modalities into the policy contributes to improving the robustness of manipulation involving broad and delicate contact.
Keyword Assisted Topic Models
Apr 13, 2020
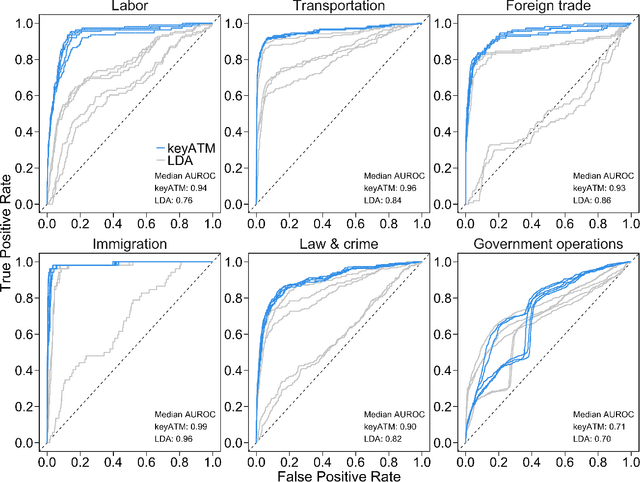

For a long time, many social scientists have conducted content analysis by using their substantive knowledge and manually coding documents. In recent years, however, fully automated content analysis based on probabilistic topic models has become increasingly popular because of their scalability. Unfortunately, applied researchers find that these models often fail to yield topics of their substantive interest by inadvertently creating multiple topics with similar content and combining different themes into a single topic. In this paper, we empirically demonstrate that providing topic models with a small number of keywords can substantially improve their performance. The proposed keyword assisted topic model (keyATM) offers an important advantage that the specification of keywords requires researchers to label topics prior to fitting a model to the data. This contrasts with a widespread practice of post-hoc topic interpretation and adjustments that compromises the objectivity of empirical findings. In our applications, we find that the keyATM provides more interpretable results, has better document classification performance, and is less sensitive to the number of topics than the standard topic models. Finally, we show that the keyATM can also incorporate covariates and model time trends. An open-source software package is available for implementing the proposed methodology.