 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-like autonomy emerges from self-play and a pinch of human data
Jun 11, 2026Self-play reinforcement learning has recently emerged as a way to train driving policies without any human data. It uses cheap, large-scale simulations to substitute expensive, large-scale human driving demonstrations. A key limitation of this approach is that policies trained through pure self-play can learn effective but alien driving conventions incompatible with people. Previous works attempt to mitigate such behavioral misalignments through extensive reward engineering and domain randomization, which are brittle and labor-intensive. Instead of completely discarding human demonstrations, our method treats them as a regularization objective on top of a minimal safe goal-reaching reward. Like the spice in a good stew, we find that a little human data goes a long way: our method uses only 30 minutes of human demonstrations, 2500x fewer than comparable imitation learning approaches. Resulting policies coordinate with held-out human trajectories and complete training in 15 hours on a single consumer-grade GPU. Videos and full source code are available at https://spiced-self-play.com/.
From Canada to Japan: How 10,000 km Affect User Perception in Robot Teleoperation
Aug 07, 2025Robot teleoperation (RTo) has emerged as a viable alternative to local control, particularly when human intervention is still necessary. This research aims to study the distance effect on user perception in RTo, exploring the potential of teleoperated robots for older adult care. We propose an evaluation of non-expert users' perception of long-distance RTo, examining how their perception changes before and after interaction, as well as comparing it to that of locally operated robots. We have designed a specific protocol consisting of multiple questionnaires, along with a dedicated software architecture using the Robotics Operating System (ROS) and Unity. The results revealed no statistically significant differences between the local and remote robot conditions, suggesting that robots may be a viable alternative to traditional local control.
Building reliable sim driving agents by scaling self-play
Feb 20, 2025



Simulation agents are essential for designing and testing systems that interact with humans, such as autonomous vehicles (AVs). These agents serve various purposes, from benchmarking AV performance to stress-testing the system's limits, but all use cases share a key requirement: reliability. A simulation agent should behave as intended by the designer, minimizing unintended actions like collisions that can compromise the signal-to-noise ratio of analyses. As a foundation for reliable sim agents, we propose scaling self-play to thousands of scenarios on the Waymo Open Motion Dataset under semi-realistic limits on human perception and control. Training from scratch on a single GPU, our agents nearly solve the full training set within a day. They generalize effectively to unseen test scenes, achieving a 99.8% goal completion rate with less than 0.8% combined collision and off-road incidents across 10,000 held-out scenarios. Beyond in-distribution generalization, our agents show partial robustness to out-of-distribution scenes and can be fine-tuned in minutes to reach near-perfect performance in those cases. Demonstrations of agent behaviors can be found at this link. We open-source both the pre-trained agents and the complete code base. Demonstrations of agent behaviors can be found at \url{https://sites.google.com/view/reliable-sim-agents}.
Content based News Recommendation via Shortest Entity Distance over Knowledge Graphs
May 24, 2019

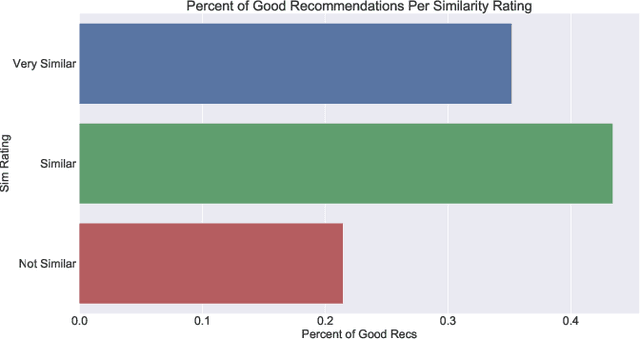
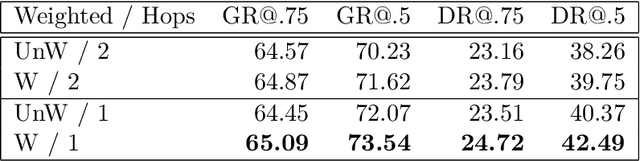
Content-based news recommendation systems need to recommend news articles based on the topics and content of articles without using user specific information. Many news articles describe the occurrence of specific events and named entities including people, places or objects. In this paper, we propose a graph traversal algorithm as well as a novel weighting scheme for cold-start content based news recommendation utilizing these named entities. Seeking to create a higher degree of user-specific relevance, our algorithm computes the shortest distance between named entities, across news articles, over a large knowledge graph. Moreover, we have created a new human annotated data set for evaluating content based news recommendation systems. Experimental results show our method is suitable to tackle the hard cold-start problem and it produces stronger Pearson correlation to human similarity scores than other cold-start methods. Our method is also complementary and a combination with the conventional cold-start recommendation methods may yield significant performance gains. The dataset, CNRec, is available at: https://github.com/kevinj22/CNRec