 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy Having 10,000 Parameters in Your Camera Model is Better Than Twelve
Dec 05, 2019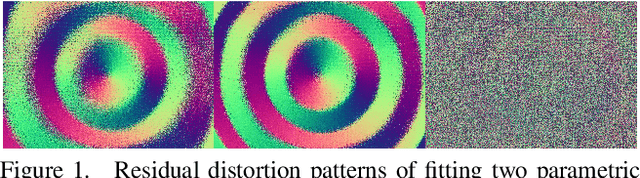
Camera calibration is an essential first step in setting up 3D Computer Vision systems. Commonly used parametric camera models are limited to a few degrees of freedom and thus often do not optimally fit to complex real lens distortion. In contrast, generic camera models allow for very accurate calibration due to their flexibility. Despite this, they have seen little use in practice. In this paper, we argue that this should change. We propose a calibration pipeline for generic models that is fully automated, easy to use, and can act as a drop-in replacement for parametric calibration, with a focus on accuracy. We compare our results to parametric calibrations. Considering stereo depth estimation and camera pose estimation as examples, we show that the calibration error acts as a bias on the results. We thus argue that in contrast to current common practice, generic models should be preferred over parametric ones whenever possible. To facilitate this, we released our calibration pipeline at https://github.com/puzzlepaint/camera_calibration , making both easy-to-use and accurate camera calibration available to everyone.
SurfelMeshing: Online Surfel-Based Mesh Reconstruction
Oct 01, 2018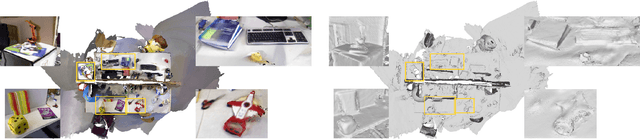
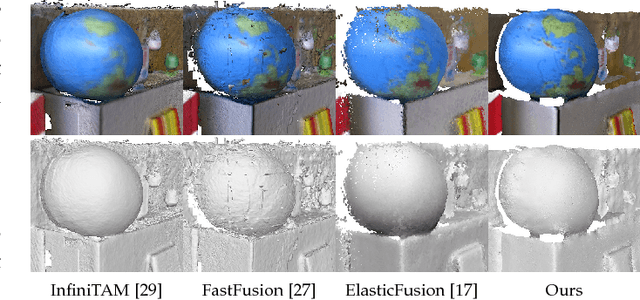
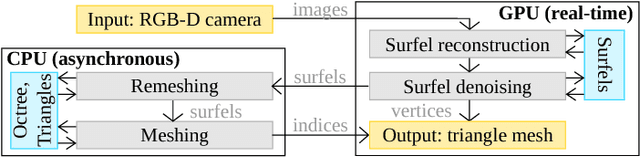

We address the problem of mesh reconstruction from live RGB-D video, assuming a calibrated camera and poses provided externally (e.g., by a SLAM system). In contrast to most existing approaches, we do not fuse depth measurements in a volume but in a dense surfel cloud. We asynchronously (re)triangulate the smoothed surfels to reconstruct a surface mesh. This novel approach enables to maintain a dense surface representation of the scene during SLAM which can quickly adapt to loop closures. This is possible by deforming the surfel cloud and asynchronously remeshing the surface where necessary. The surfel-based representation also naturally supports strongly varying scan resolution. In particular, it reconstructs colors at the input camera's resolution. Moreover, in contrast to many volumetric approaches, ours can reconstruct thin objects since objects do not need to enclose a volume. We demonstrate our approach in a number of experiments, showing that it produces reconstructions that are competitive with the state-of-the-art, and we discuss its advantages and limitations. The algorithm (excluding loop closure functionality) is available as open source at https://github.com/puzzlepaint/surfelmeshing.