 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAvailability of Aerial Heterogeneous Networks for Reliable Emergency Communications
Feb 25, 2026We investigate network availability (NA) in aerial heterogeneous networks (AHetNets) for effective emergency rescue, where diverse delay-constrained communication services must be provided to user equipments (UEs) with varying mobility. The heterogeneity in delay constraints and UE mobility introduces resource allocation conflicts and imbalances, which undermine communication reliability and challenge NA. Although unified resource allocation (URA) can mitigate these issues, it remains unclear whether NA can be sustained under such diverse conditions. To address this, we derive expressions for the lower bound (LB) on NA in AHetNets under URA. Our analysis reveals that extended heterogeneity significantly degrades the LB due to resource limitations-even when the heterogeneity stems from additional services under less stringent delay constraints (LSDC) or from UEs with lower mobility. To overcome this degradation, we formulate and solve a joint optimization problem for the number of UEs sharing time-frequency resources ($K$) and pilot length ($ξ$), aiming to enhance the LB by improving spatial, frequency, and temporal resource efficiency. Simulation results validate our analysis and demonstrate that jointly optimizing $K$ and $ξ$ enables AHetNets to achieve the target NA under greater heterogeneity, outperforming existing resource allocation policies.
BLADE: Benchmarking Language Model Agents for Data-Driven Science
Aug 20, 2024



Data-driven scientific discovery requires the iterative integration of scientific domain knowledge, statistical expertise, and an understanding of data semantics to make nuanced analytical decisions, e.g., about which variables, transformations, and statistical models to consider. LM-based agents equipped with planning, memory, and code execution capabilities have the potential to support data-driven science. However, evaluating agents on such open-ended tasks is challenging due to multiple valid approaches, partially correct steps, and different ways to express the same decisions. To address these challenges, we present BLADE, a benchmark to automatically evaluate agents' multifaceted approaches to open-ended research questions. BLADE consists of 12 datasets and research questions drawn from existing scientific literature, with ground truth collected from independent analyses by expert data scientists and researchers. To automatically evaluate agent responses, we developed corresponding computational methods to match different representations of analyses to this ground truth. Though language models possess considerable world knowledge, our evaluation shows that they are often limited to basic analyses. However, agents capable of interacting with the underlying data demonstrate improved, but still non-optimal, diversity in their analytical decision making. Our work enables the evaluation of agents for data-driven science and provides researchers deeper insights into agents' analysis approaches.
An evaluation of Deep Learning based stereo dense matching dataset shift from aerial images and a large scale stereo dataset
Feb 19, 2024



Dense matching is crucial for 3D scene reconstruction since it enables the recovery of scene 3D geometry from image acquisition. Deep Learning (DL)-based methods have shown effectiveness in the special case of epipolar stereo disparity estimation in the computer vision community. DL-based methods depend heavily on the quality and quantity of training datasets. However, generating ground-truth disparity maps for real scenes remains a challenging task in the photogrammetry community. To address this challenge, we propose a method for generating ground-truth disparity maps directly from Light Detection and Ranging (LiDAR) and images to produce a large and diverse dataset for six aerial datasets across four different areas and two areas with different resolution images. We also introduce a LiDAR-to-image co-registration refinement to the framework that takes special precautions regarding occlusions and refrains from disparity interpolation to avoid precision loss. Evaluating 11 dense matching methods across datasets with diverse scene types, image resolutions, and geometric configurations, which are deeply investigated in dataset shift, GANet performs best with identical training and testing data, and PSMNet shows robustness across different datasets, and we proposed the best strategy for training with a limit dataset. We will also provide the dataset and training models; more information can be found at https://github.com/whuwuteng/Aerial_Stereo_Dataset.
Mobile Mapping Mesh Change Detection and Update
Mar 13, 2023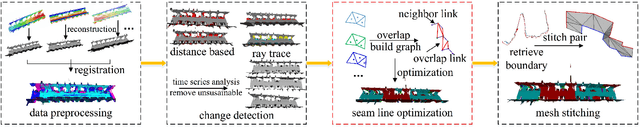
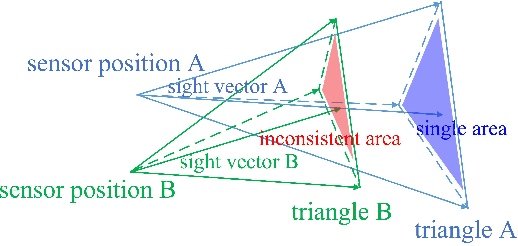
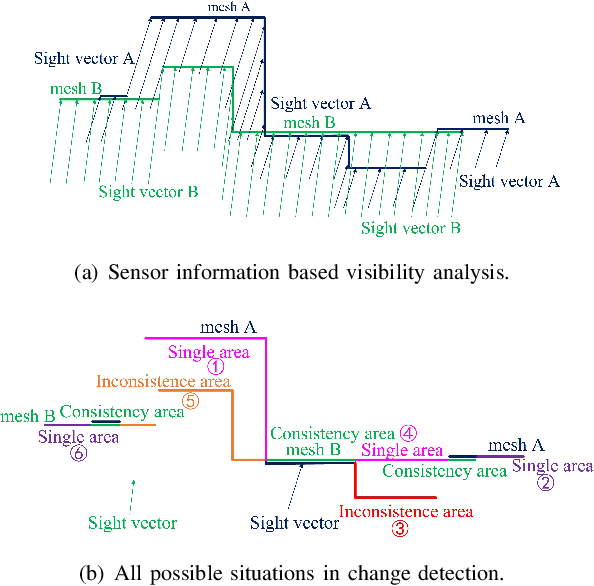
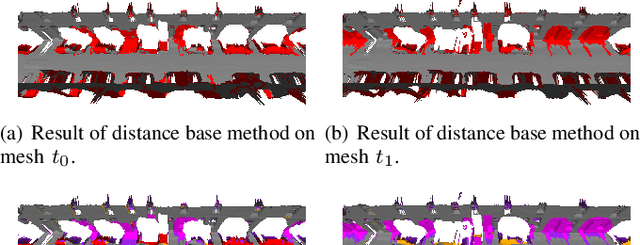
Mobile mapping, in particular, Mobile Lidar Scanning (MLS) is increasingly widespread to monitor and map urban scenes at city scale with unprecedented resolution and accuracy. The resulting point cloud sampling of the scene geometry can be meshed in order to create a continuous representation for different applications: visualization, simulation, navigation, etc. Because of the highly dynamic nature of these urban scenes, long term mapping should rely on frequent map updates. A trivial solution is to simply replace old data with newer data each time a new acquisition is made. However it has two drawbacks: 1) the old data may be of higher quality (resolution, precision) than the new and 2) the coverage of the scene might be different in various acquisitions, including varying occlusions. In this paper, we propose a fully automatic pipeline to address these two issues by formulating the problem of merging meshes with different quality, coverage and acquisition time. Our method is based on a combined distance and visibility based change detection, a time series analysis to assess the sustainability of changes, a mesh mosaicking based on a global boolean optimization and finally a stitching of the resulting mesh pieces boundaries with triangle strips. Finally, our method is demonstrated on Robotcar and Stereopolis datasets.