 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Wildfires Detection and Dynamic Escape Routes Planning for Humans through Information Fusion between Drones and Satellites
Dec 06, 2023UAVs are playing an increasingly important role in the field of wilderness rescue by virtue of their flexibility. This paper proposes a fusion of UAV vision technology and satellite image analysis technology for active wildfires detection and road networks extraction of wildfire areas and real-time dynamic escape route planning for people in distress. Firstly, the fire source location and the segmentation of smoke and flames are targeted based on Sentinel 2 satellite imagery. Secondly, the road segmentation and the road condition assessment are performed by D-linkNet and NDVI values in the central area of the fire source by UAV. Finally, the dynamic optimal route planning for humans in real time is performed by the weighted A* algorithm in the road network with the dynamic fire spread model. Taking the Chongqing wildfire on August 24, 2022, as a case study, the results demonstrate that the dynamic escape route planning algorithm can provide an optimal real-time navigation path for humans in the presence of fire through the information fusion of UAVs and satellites.
Optimal Wildfire Escape Route Planning for Drones under Dynamic Fire and Smoke
Dec 06, 2023In recent years, the increasing prevalence and intensity of wildfires have posed significant challenges to emergency response teams. The utilization of unmanned aerial vehicles (UAVs), commonly known as drones, has shown promise in aiding wildfire management efforts. This work focuses on the development of an optimal wildfire escape route planning system specifically designed for drones, considering dynamic fire and smoke models. First, the location of the source of the wildfire can be well located by information fusion between UAV and satellite, and the road conditions in the vicinity of the fire can be assessed and analyzed using multi-channel remote sensing data. Second, the road network can be extracted and segmented in real time using UAV vision technology, and each road in the road network map can be given priority based on the results of road condition classification. Third, the spread model of dynamic fires calculates the new location of the fire source based on the fire intensity, wind speed and direction, and the radius increases as the wildfire spreads. Smoke is generated around the fire source to create a visual representation of a burning fire. Finally, based on the improved A* algorithm, which considers all the above factors, the UAV can quickly plan an escape route based on the starting and destination locations that avoid the location of the fire source and the area where it is spreading. By considering dynamic fire and smoke models, the proposed system enhances the safety and efficiency of drone operations in wildfire environments.
Virtually increasing the measurement frequency of LIDAR sensor utilizing a single RGB camera
Feb 10, 2023The frame rates of most 3D LIDAR sensors used in intelligent vehicles are substantially lower than current cameras installed in the same vehicle. This research suggests using a mono camera to virtually enhance the frame rate of LIDARs, allowing the more frequent monitoring of dynamic objects in the surroundings that move quickly. As a first step, dynamic object candidates are identified and tracked in the camera frames. Following that, the LIDAR measurement points of these items are found by clustering in the frustums of 2D bounding boxes. Projecting these to the camera and tracking them to the next camera frame can be used to create 3D-2D correspondences between different timesteps. These correspondences between the last LIDAR frame and the actual camera frame are used to solve the PnP (Perspective-n-Point) problem. Finally, the estimated transformations are applied to the previously measured points to generate virtual measurements. With the proposed estimation, if the ego movement is known, not just static object position can be determined at timesteps where camera measurement is available, but positions of dynamic objects as well. We achieve state-of-the-art performance on large public datasets in terms of accuracy and similarity to real measurements.
KonIQ-10k: An ecologically valid database for deep learning of blind image quality assessment
Oct 14, 2019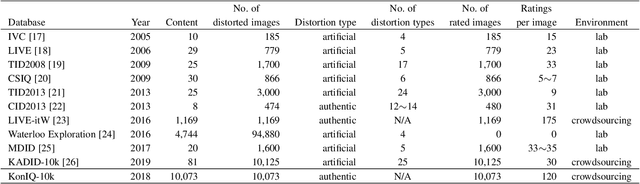
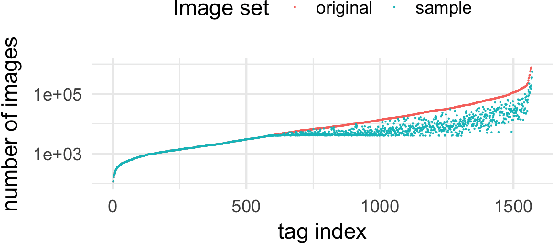

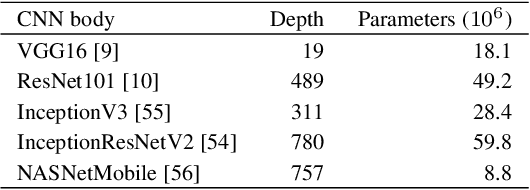
Deep learning methods for image quality assessment (IQA) are limited due to the small size of existing datasets. Extensive datasets require substantial resources both for generating publishable content, and annotating it accurately. We present a systematic and scalable approach to create KonIQ-10k, the largest IQA dataset to date consisting of 10,073 quality scored images. This is the first in-the-wild database aiming for ecological validity, with regard to the authenticity of distortions, the diversity of content, and quality-related indicators. Through the use of crowdsourcing, we obtained 1.2 million reliable quality ratings from 1,459 crowd workers, paving the way for more general IQA models. We propose a novel, deep learning model (KonCept512), to show an excellent generalization beyond the test set (0.921 SROCC), to the current state-of-the-art database LIVE-in-the-Wild (0.825 SROCC). The model derives its core performance from the InceptionResNet architecture, being trained at a higher resolution than previous models (512x384). A correlation analysis shows that KonCept512 performs similar to having 9 subjective scores for each test image.