 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowcean - Model Learning for Cyber-Physical Systems
Mar 12, 2026Effective models of Cyber-Physical Systems (CPS) are crucial for their design and operation. Constructing such models is difficult and time-consuming due to the inherent complexity of CPS. As a result, data-driven model generation using machine learning methods is gaining popularity. In this paper, we present Flowcean, a novel framework designed to automate the generation of models through data-driven learning that focuses on modularity and usability. By offering various learning strategies, data processing methods, and evaluation metrics, our framework provides a comprehensive solution, tailored to CPS scenarios. Flowcean facilitates the integration of diverse learning libraries and tools within a modular and flexible architecture, ensuring adaptability to a wide range of modeling tasks. This streamlines the process of model generation and evaluation, making it more efficient and accessible.
Data-Driven Probabilistic Evaluation of Logic Properties with PAC-Confidence on Mealy Machines
Aug 20, 2025


Cyber-Physical Systems (CPS) are complex systems that require powerful models for tasks like verification, diagnosis, or debugging. Often, suitable models are not available and manual extraction is difficult. Data-driven approaches then provide a solution to, e.g., diagnosis tasks and verification problems based on data collected from the system. In this paper, we consider CPS with a discrete abstraction in the form of a Mealy machine. We propose a data-driven approach to determine the safety probability of the system on a finite horizon of n time steps. The approach is based on the Probably Approximately Correct (PAC) learning paradigm. Thus, we elaborate a connection between discrete logic and probabilistic reachability analysis of systems, especially providing an additional confidence on the determined probability. The learning process follows an active learning paradigm, where new learning data is sampled in a guided way after an initial learning set is collected. We validate the approach with a case study on an automated lane-keeping system.
Decision Trees for Analyzing Influences on the Accuracy of Indoor Localization Systems
Jul 08, 2022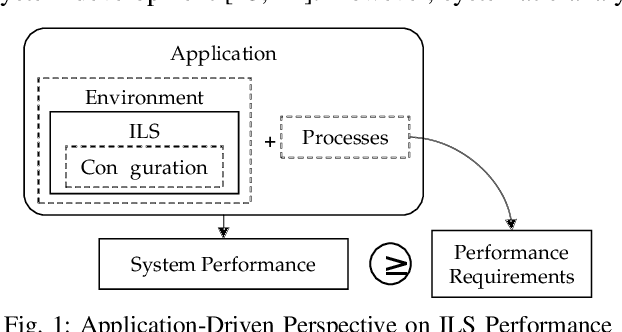
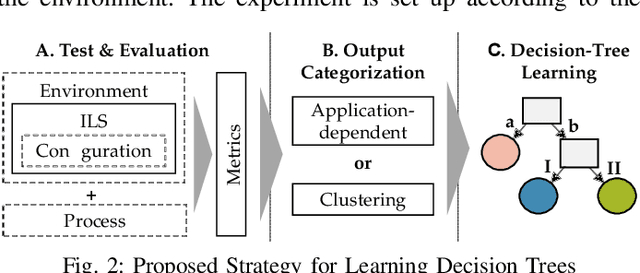
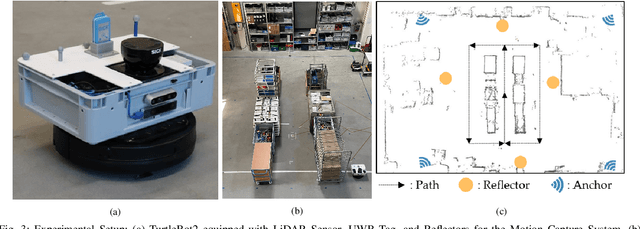
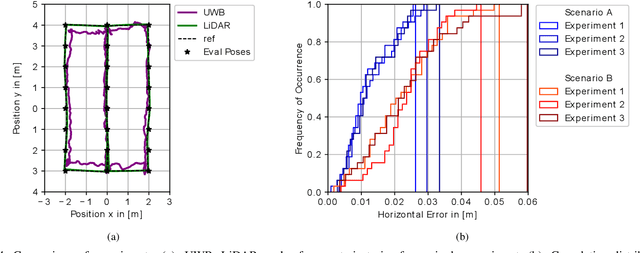
Absolute position accuracy is the key performance criterion of an Indoor Localization System (ILS). Since ILS are heterogeneous and complex cyber-physical systems, the localization accuracy depends on various influences from the environment, system configuration, and the application processes. To determine the position accuracy of a system in a reproducible, comparable, and realistic manner, these factors must be taken into account. We propose a strategy for analyzing the influences on the position accuracy of ILS using decision trees in combination with application-related or technology-related categorization. The proposed strategy is validated using empirical data from 120 experiments. The accuracy of an Ultra-Wideband and a LiDAR-based ILS was determined under different application-driven influencing factors, considering the application of autonomous mobile robots in warehouses. Finally, the opportunities and limitations of analyzing decision trees to compare system performance, find a suitable system, optimize the environment or system configuration, and understand the relevance of different influencing factors are presented.