 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Visual Feature Representations for LiDAR-Inertial-Visual Odometry Under Challenging Conditions
Mar 19, 2026Accurate localization in autonomous driving is critical for successful missions including environmental mapping and survivor searches. In visually challenging environments, including low-light conditions, overexposure, illumination changes, and high parallax, the performance of conventional visual odometry methods significantly degrade undermining robust robotic navigation. Researchers have recently proposed LiDAR-inertial-visual odometry (LIVO) frameworks, that integrate LiDAR, IMU, and camera sensors, to address these challenges. This paper extends the FAST-LIVO2-based framework by introducing a hybrid approach that integrates direct photometric methods with descriptor-based feature matching. For the descriptor-based feature matching, this work proposes pairs of ORB with the Hamming distance, SuperPoint with SuperGlue, SuperPoint with LightGlue, and XFeat with the mutual nearest neighbor. The proposed configurations are benchmarked by accuracy, computational cost, and feature tracking stability, enabling a quantitative comparison of the adaptability and applicability of visual descriptors. The experimental results reveal that the proposed hybrid approach outperforms the conventional sparse-direct method. Although the sparse-direct method often fails to converge in regions where photometric inconsistency arises due to illumination changes, the proposed approach still maintains robust performance under the same conditions. Furthermore, the hybrid approach with learning-based descriptors enables robust and reliable visual state estimation across challenging environments.
* 14 pages, Publised IEEE Access2026
Access Controlled Website Interaction for Agentic AI with Delegated Critical Tasks
Mar 18, 2026Recent studies reveal gaps in delegating critical tasks to agentic AI that accesses websites on the user's behalf, primarily due to limited access control mechanisms on websites designed for agentic AI. In response, we propose a design of website-based interaction for AI agents with fine-grained access control for delegated critical tasks. Our approach encompasses a website design and implementation, as well as modifications to the access grant protocols in an open-source authorization service to tailor it to agentic AI, with delegated critical tasks on the website. The evaluation of our approach demonstrates the capabilities of our access-controlled website used by AI agents.
HyperCLOVA X Technical Report
Apr 13, 2024We introduce HyperCLOVA X, a family of large language models (LLMs) tailored to the Korean language and culture, along with competitive capabilities in English, math, and coding. HyperCLOVA X was trained on a balanced mix of Korean, English, and code data, followed by instruction-tuning with high-quality human-annotated datasets while abiding by strict safety guidelines reflecting our commitment to responsible AI. The model is evaluated across various benchmarks, including comprehensive reasoning, knowledge, commonsense, factuality, coding, math, chatting, instruction-following, and harmlessness, in both Korean and English. HyperCLOVA X exhibits strong reasoning capabilities in Korean backed by a deep understanding of the language and cultural nuances. Further analysis of the inherent bilingual nature and its extension to multilingualism highlights the model's cross-lingual proficiency and strong generalization ability to untargeted languages, including machine translation between several language pairs and cross-lingual inference tasks. We believe that HyperCLOVA X can provide helpful guidance for regions or countries in developing their sovereign LLMs.
CareCall: a Call-Based Active Monitoring Dialog Agent for Managing COVID-19 Pandemic
Jul 06, 2020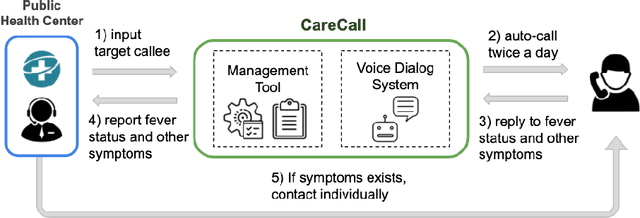
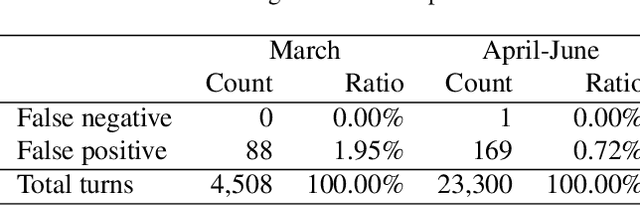
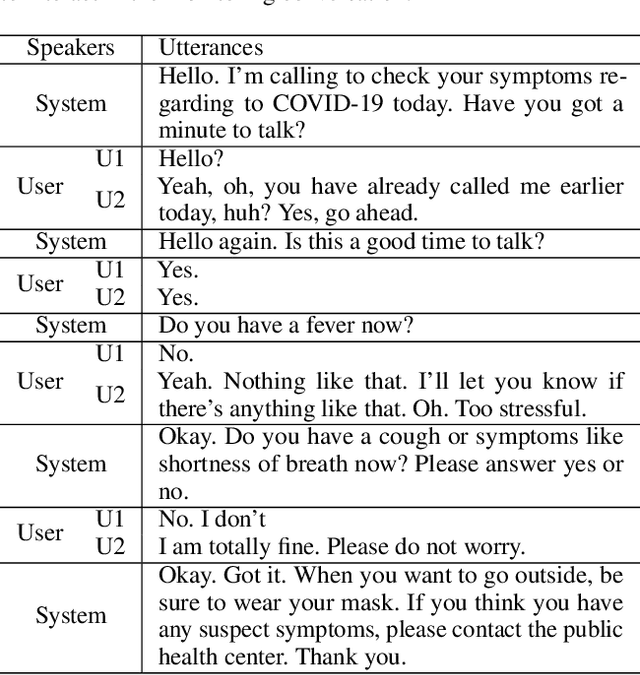
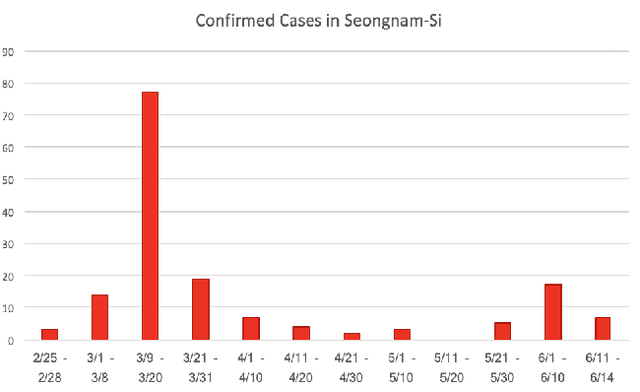
Tracking suspected cases of COVID-19 is crucial to suppressing the spread of COVID-19 pandemic. Active monitoring and proactive inspection are indispensable to mitigate COVID-19 spread, though these require considerable social and economic expense. To address this issue, we introduce CareCall, a call-based dialog agent which is deployed for active monitoring in Korea and Japan. We describe our system with a case study with statistics to show how the system works. Finally, we discuss a simple idea which uses CareCall to support proactive inspection.