 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Models and Learning Algorithms for Core-Periphery Structured Graphs
Oct 04, 2022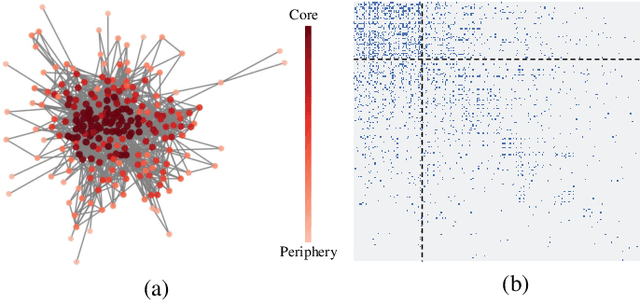
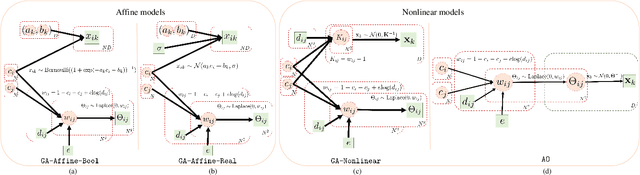
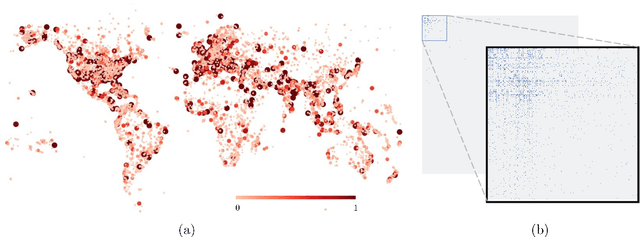
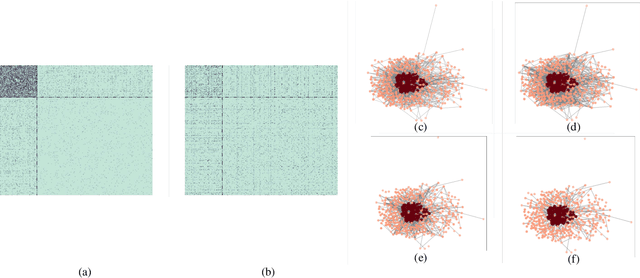
We consider core-periphery structured graphs, which are graphs with a group of densely and sparsely connected nodes, respectively, referred to as core and periphery nodes. The so-called core score of a node is related to the likelihood of it being a core node. In this paper, we focus on learning the core scores of a graph from its node attributes and connectivity structure. To this end, we propose two classes of probabilistic graphical models: affine and nonlinear. First, we describe affine generative models to model the dependence of node attributes on its core scores, which determine the graph structure. Next, we discuss nonlinear generative models in which the partial correlations of node attributes influence the graph structure through latent core scores. We develop algorithms for inferring the model parameters and core scores of a graph when both the graph structure and node attributes are available. When only the node attributes of graphs are available, we jointly learn a core-periphery structured graph and its core scores. We provide results from numerical experiments on several synthetic and real-world datasets to demonstrate the efficacy of the developed models and algorithms.
Beamforming in Integrated Sensing and Communication Systems with Reconfigurable Intelligent Surfaces
Jun 15, 2022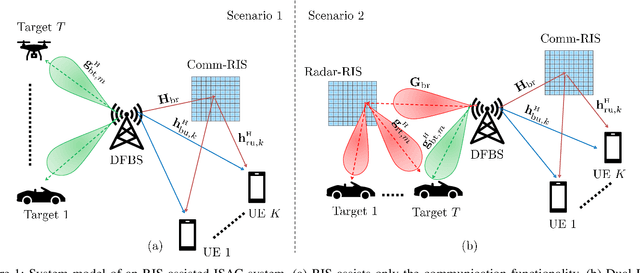
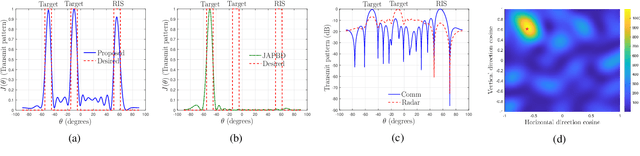
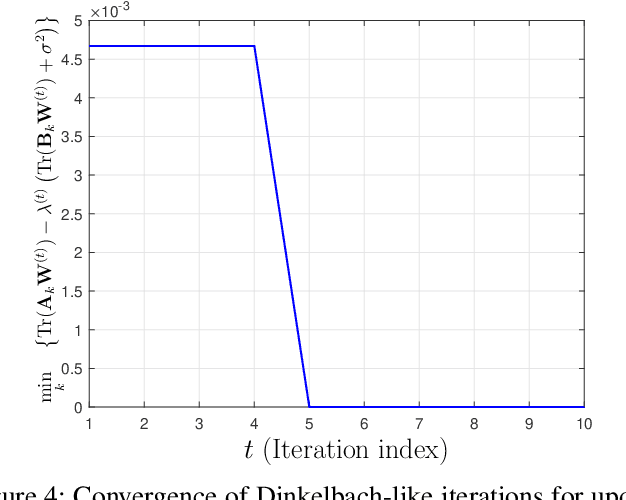
We consider transmit beamforming and reflection pattern design in reconfigurable intelligent surface (RIS)-assisted integrated sensing and communication (ISAC) systems to jointly precode communication symbols and radar waveforms. We treat two settings of multiple users and targets. In the first, we use a single RIS to enhance the communication performance of the ISAC system and design beams with good cross-correlation properties to match a desired beam pattern while guaranteeing a desired signal-to-interference plus noise ratio (SINR) for each user. In the second setting, we use two dedicated RISs to aid the ISAC system, wherein the beams are designed to maximize the worst-case target illumination power while guaranteeing a desired SINR for each user. We propose solvers based on alternating optimization as the design problems in both cases are non-convex optimization problems. Through a number of numerical simulations, we demonstrate the advantages of RIS-assisted ISAC systems. In particular, we show that the proposed single-RIS assisted ISAC system improves the minimum user SINR while suffering from a moderate loss in radar target illumination power. On the other hand, the dual-RIS assisted ISAC system improves both minimum user SINR as well as worst-case target illumination power at the targets, especially when the users and targets are not directly visible.
Beamforming in Hybrid RIS assisted Integrated Sensing and Communication Systems
Mar 11, 2022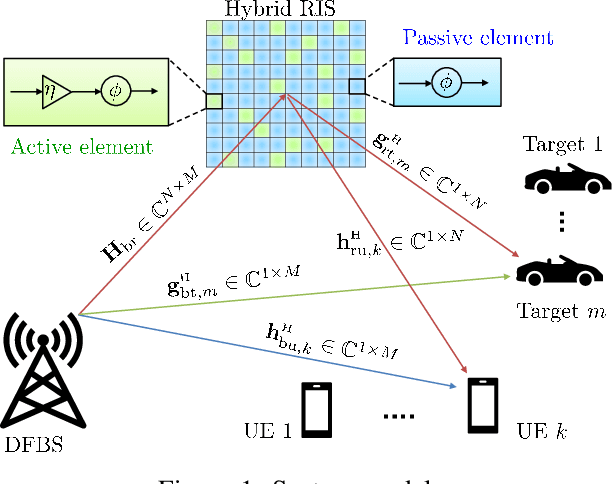
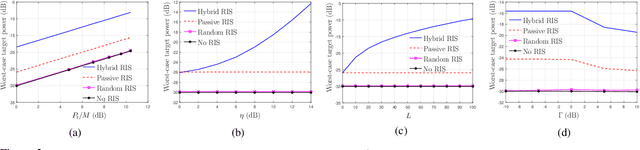
In this paper, we consider a hybrid reconfigurable intelligent surface (RIS) comprising of active and passive elements to aid an integrated sensing and communication (ISAC) system serving multiple users and targets. Active elements in a hybrid RIS include amplifiers and phase shifters, whereas passive elements include only phase shifters. We jointly design transmit beamformers and RIS coefficients, i.e., amplifier gains and phase shifts, to maximize the worst-case target illumination power while ensuring a desired signal-to-interference-plus-noise ratio for communication links and constraining the RIS noise power due to the active elements. Since this design problem is not convex, we propose a solver based on alternating optimization to design the transmit beamformers and RIS coefficients. Through numerical simulations, we demonstrate that the performance of the proposed hybrid RIS assisted ISAC system is significantly better than that of passive RIS assisted ISAC systems as well as ISAC systems without RIS even when only a small fraction of the hybrid RIS contains active elements.
Spectrum Surveying: Active Radio Map Estimation with Autonomous UAVs
Jan 13, 2022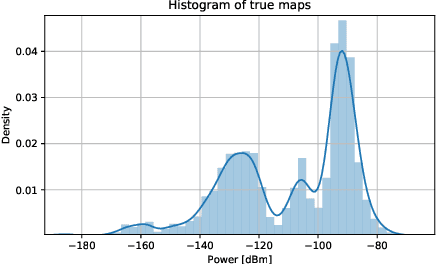
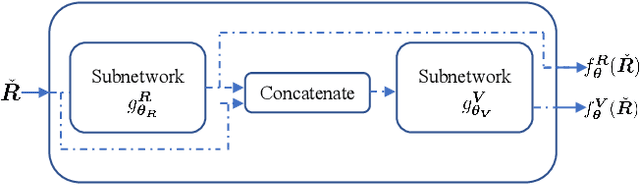
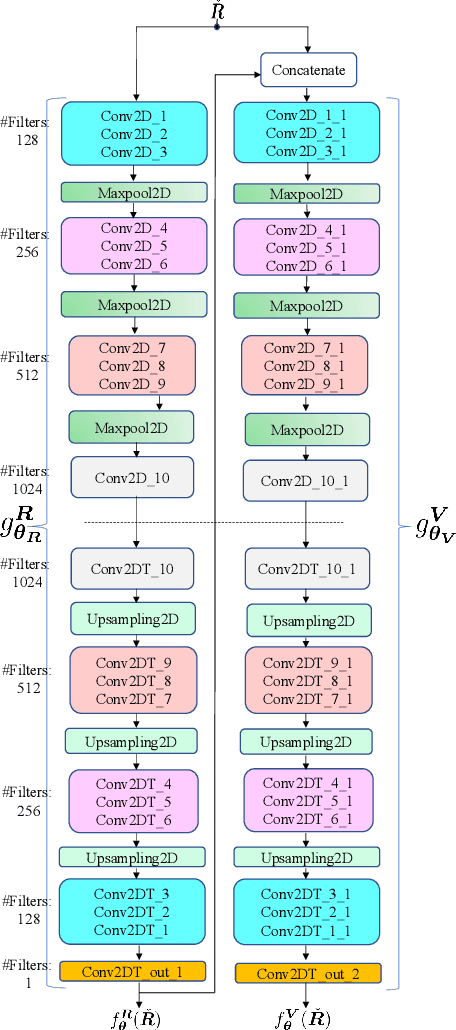
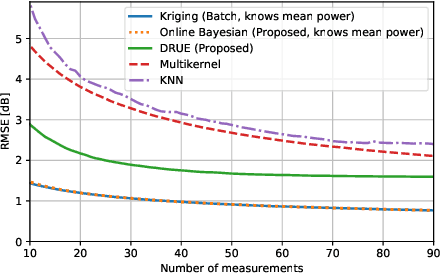
Radio maps find numerous applications in wireless communications and mobile robotics tasks, including resource allocation, interference coordination, and mission planning. Although numerous techniques have been proposed to construct radio maps from spatially distributed measurements, the locations of such measurements are assumed predetermined beforehand. In contrast, this paper proposes spectrum surveying, where a mobile robot such as an unmanned aerial vehicle (UAV) collects measurements at a set of locations that are actively selected to obtain high-quality map estimates in a short surveying time. This is performed in two steps. First, two novel algorithms, a model-based online Bayesian estimator and a data-driven deep learning algorithm, are devised for updating a map estimate and an uncertainty metric that indicates the informativeness of measurements at each possible location. These algorithms offer complementary benefits and feature constant complexity per measurement. Second, the uncertainty metric is used to plan the trajectory of the UAV to gather measurements at the most informative locations. To overcome the combinatorial complexity of this problem, a dynamic programming approach is proposed to obtain lists of waypoints through areas of large uncertainty in linear time. Numerical experiments conducted on a realistic dataset confirm that the proposed scheme constructs accurate radio maps quickly.
Graph Neural Networks with Parallel Neighborhood Aggregations for Graph Classification
Nov 22, 2021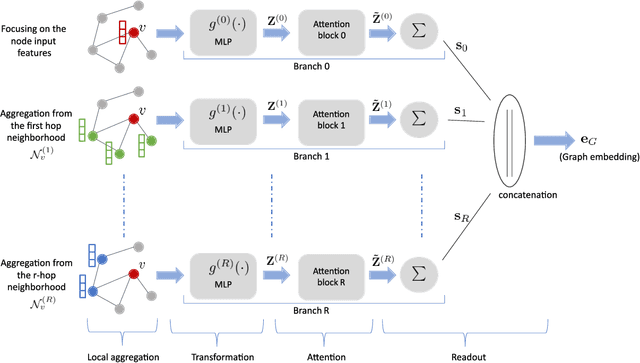
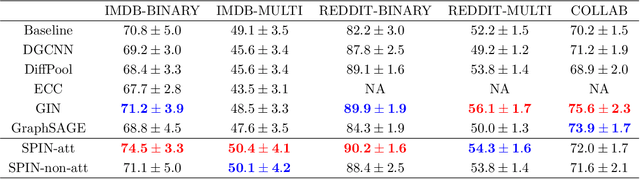
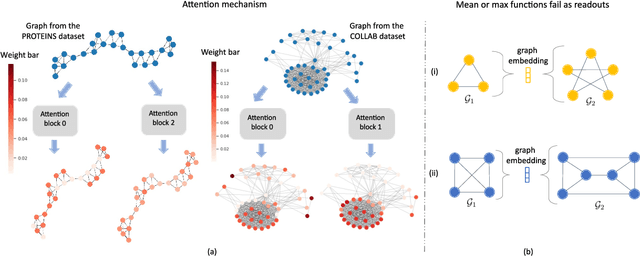
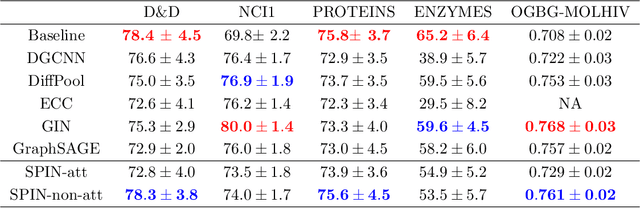
We focus on graph classification using a graph neural network (GNN) model that precomputes the node features using a bank of neighborhood aggregation graph operators arranged in parallel. These GNN models have a natural advantage of reduced training and inference time due to the precomputations but are also fundamentally different from popular GNN variants that update node features through a sequential neighborhood aggregation procedure during training. We provide theoretical conditions under which a generic GNN model with parallel neighborhood aggregations (PA-GNNs, in short) are provably as powerful as the well-known Weisfeiler-Lehman (WL) graph isomorphism test in discriminating non-isomorphic graphs. Although PA-GNN models do not have an apparent relationship with the WL test, we show that the graph embeddings obtained from these two methods are injectively related. We then propose a specialized PA-GNN model, called SPIN, which obeys the developed conditions. We demonstrate via numerical experiments that the developed model achieves state-of-the-art performance on many diverse real-world datasets while maintaining the discriminative power of the WL test and the computational advantage of preprocessing graphs before the training process.
Faster Rates for the Frank-Wolfe Algorithm Using Jacobi Polynomials
Oct 19, 2021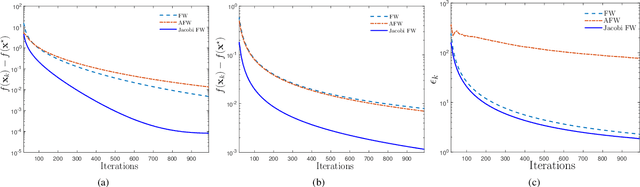
The Frank Wolfe algorithm (FW) is a popular projection-free alternative for solving large-scale constrained optimization problems. However, the FW algorithm suffers from a sublinear convergence rate when minimizing a smooth convex function over a compact convex set. Thus, exploring techniques that yield a faster convergence rate becomes crucial. A classic approach to obtain faster rates is to combine previous iterates to obtain the next iterate. In this work, we extend this approach to the FW setting and show that the optimal way to combine the past iterates is using a set of orthogonal Jacobi polynomials. We also a polynomial-based acceleration technique, referred to as Jacobi polynomial accelerated FW, which combines the current iterate with the past iterate using combing weights related to the Jacobi recursion. By carefully choosing parameters of the Jacobi polynomials, we obtain a faster sublinear convergence rate. We provide numerical experiments on real datasets to demonstrate the efficacy of the proposed algorithm.
Learning Sparse Graphs with a Core-periphery Structure
Oct 08, 2021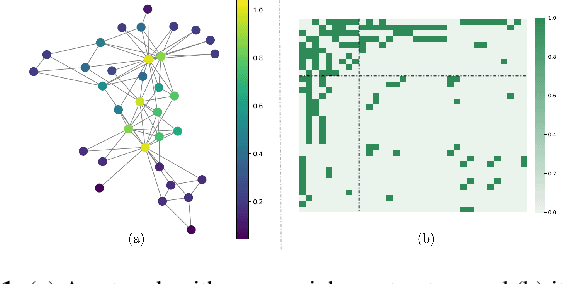
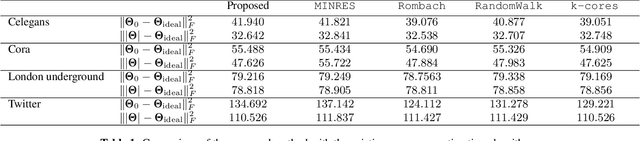
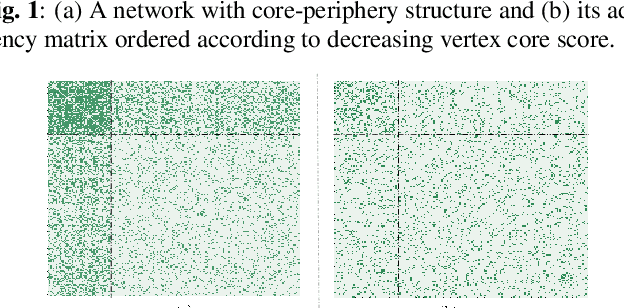
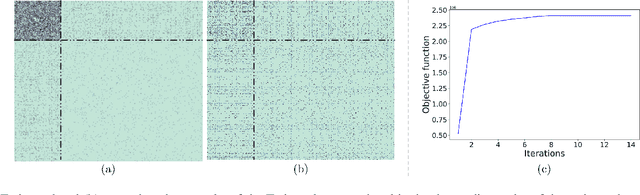
In this paper, we focus on learning sparse graphs with a core-periphery structure. We propose a generative model for data associated with core-periphery structured networks to model the dependence of node attributes on core scores of the nodes of a graph through a latent graph structure. Using the proposed model, we jointly infer a sparse graph and nodal core scores that induce dense (sparse) connections in core (respectively, peripheral) parts of the network. Numerical experiments on a variety of real-world data indicate that the proposed method learns a core-periphery structured graph from node attributes alone, while simultaneously learning core score assignments that agree well with existing works that estimate core scores using graph as input and ignoring commonly available node attributes.
Channel Estimation in MIMO Systems with One-bit Spatial Sigma-delta ADCs
Sep 19, 2021
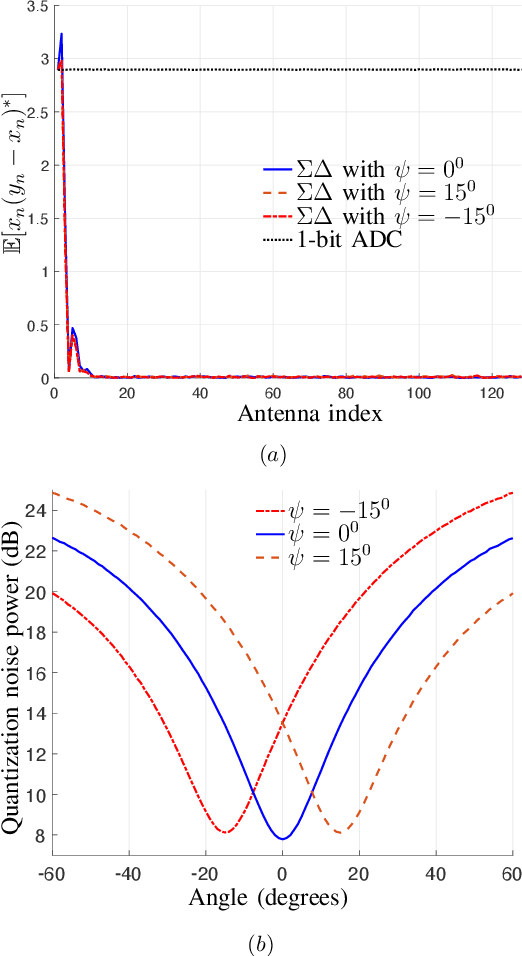
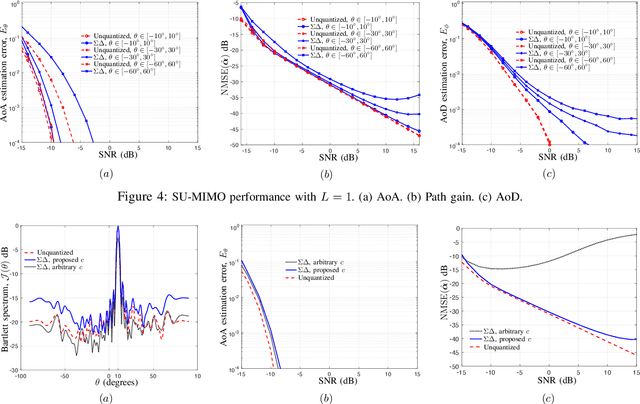
This paper focuses on channel estimation in single-user and multi-user MIMO systems with multi-antenna base stations equipped with 1-bit spatial sigma-delta analog-to-digital converters (ADCs). A careful selection of the quantization voltage level and phase shift used in the feedback loop of 1-bit sigma-delta ADCs is critical to improve its effective resolution. We first develop a quantization noise model for 1-bit spatial sigma-delta ADCs. Using the developed noise model, we then present a two-step channel estimation algorithm to estimate a multipath channel parameterized by the gains, angles of arrival (AoAs), and angles of departure (AoDs). Specifically, in the first step, the AoAs and path gains are estimated using uplink pilots, which excite all the angles uniformly. Next, in the second step, the AoDs are estimated by progressively refining uplink beams through a recursive bisection procedure. For this algorithm, we propose a technique to select the quantization voltage level and phase shift. Through numerical simulations, we demonstrate that with the proposed parametric channel estimation algorithm, MIMO systems with 1-bit spatial sigma-delta ADCs perform significantly better than those with regular 1-bit ADCs and are on par with MIMO systems with high-resolution ADCs.
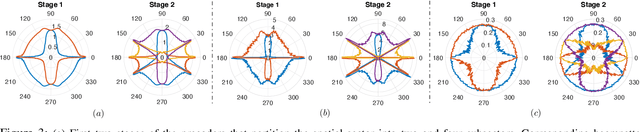
Joint Communication and Radar Sensing with Reconfigurable Intelligent Surfaces
May 05, 2021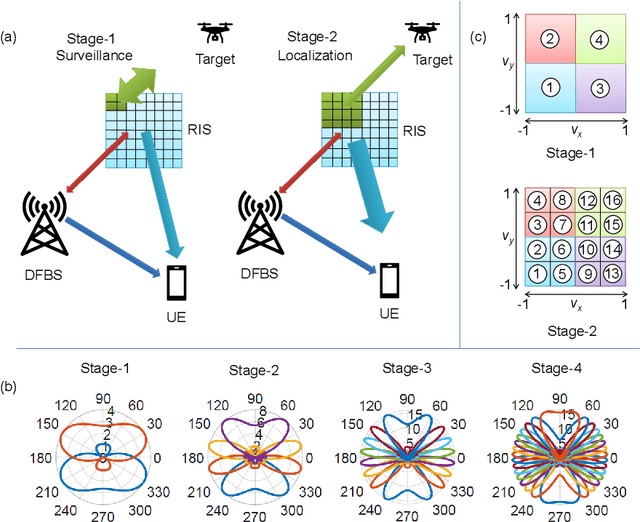
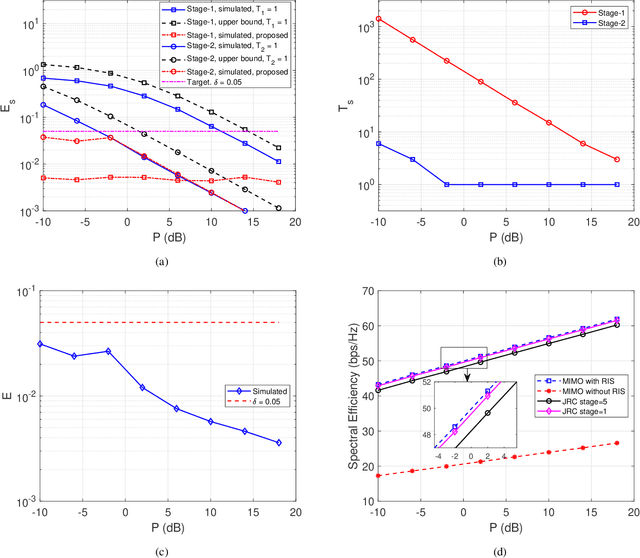
In this paper, we use a reconfigurable intelligent surface (RIS) to enhance the radar sensing and communication capabilities of a mmWave dual function radar communication system. To simultaneously localize the target and to serve the user, we propose to adaptively partition the RIS by reserving separate RIS elements for sensing and communication. We design a multi-stage hierarchical codebook to localize the target while ensuring a strong communication link to the user. We also present a method to choose the number of times to transmit the same beam in each stage to achieve a desired target localization probability of error. The proposed algorithm typically requires fewer transmissions than an exhaustive search scheme to achieve a desired target localization probability of error. Furthermore, the average spectral efficiency of the user with the proposed algorithm is found to be comparable to that of a RIS-assisted MIMO communication system without sensing capabilities and is much better than that of traditional MIMO systems without RIS.
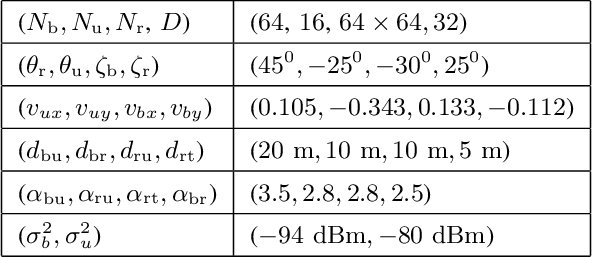
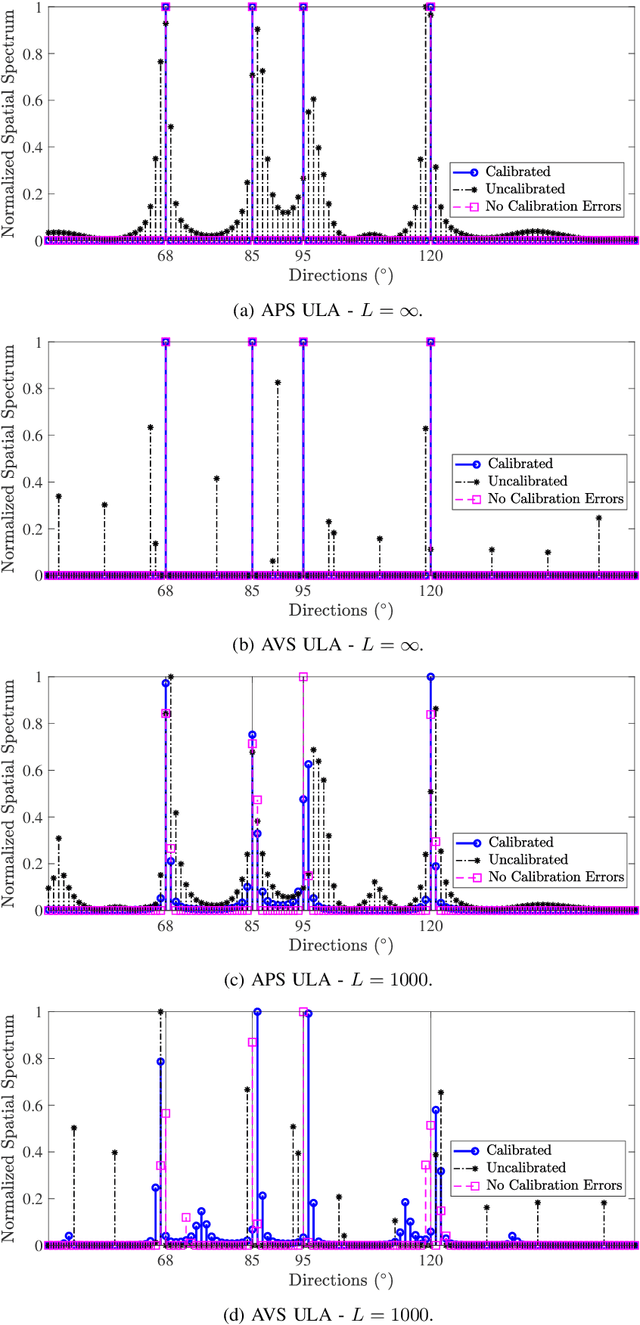
Self Calibration of Scalar and Vector Sensor Arrays
Apr 06, 2021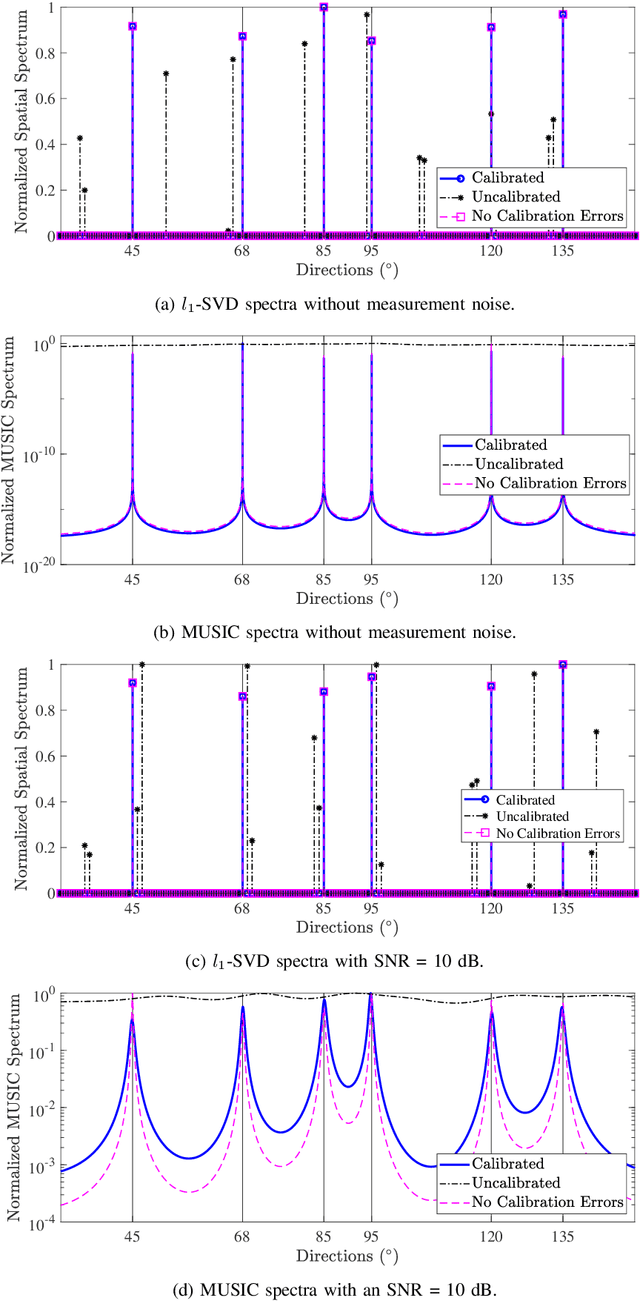
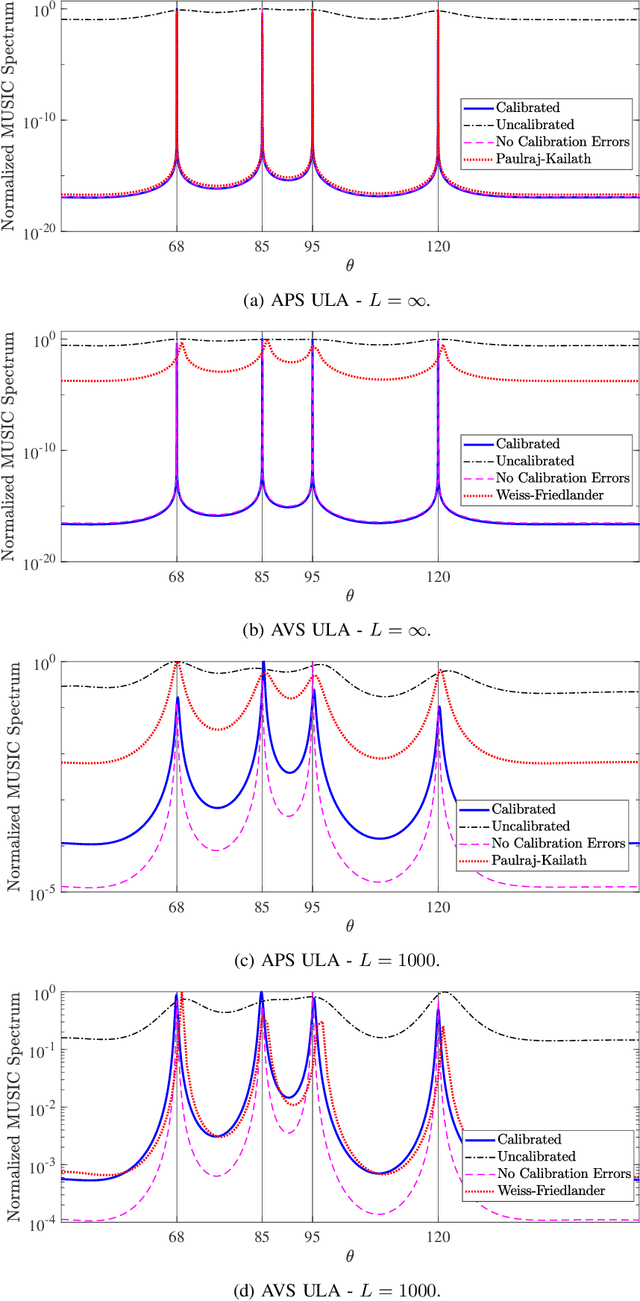
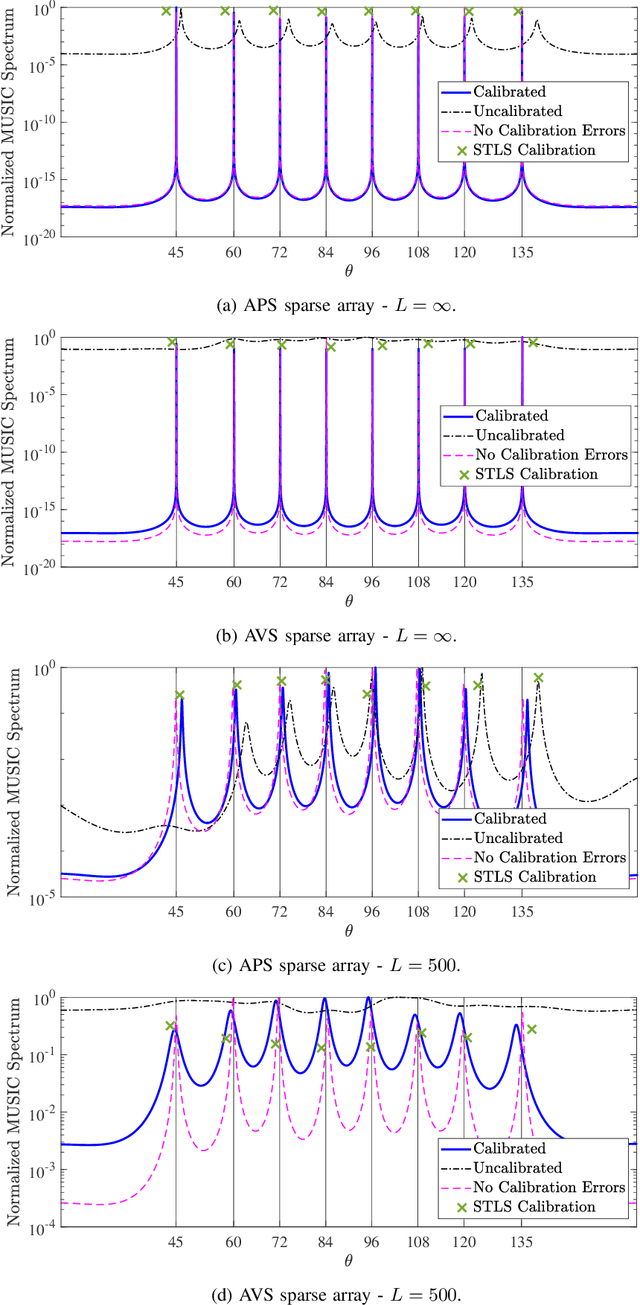
In this work, we consider the problem of joint calibration and direction-of-arrival (DOA) estimation using sensor arrays. This joint estimation problem is referred to as self calibration. Unlike many previous iterative approaches, we propose geometry independent convex optimization algorithms for jointly estimating the sensor gain and phase errors as well as the source DOAs. We derive these algorithms based on both the conventional element-space data model and the covariance data model. We focus on sparse and regular arrays formed using scalar sensors as well as vector sensors. The developed algorithms are obtained by transforming the underlying bilinear calibration model into a linear model, and subsequently by using standard convex relaxation techniques to estimate the unknown parameters. Prior to the algorithm discussion, we also derive identifiability conditions for the existence of a unique solution to the self calibration problem. To demonstrate the effectiveness of the developed techniques, numerical experiments and comparisons to the state-of-the-art methods are provided. Finally, the results from an experiment that was performed in an anechoic chamber using an acoustic vector sensor array are presented to demonstrate the usefulness of the proposed self calibration techniques.