 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Transformers for Radio Map Estimation
Nov 02, 2024



Radio map estimation (RME) involves spatial interpolation of radio measurements to predict metrics such as the received signal strength at locations where no measurements were collected. The most popular estimators nowadays project the measurement locations to a regular grid and complete the resulting measurement tensor with a convolutional deep neural network. Unfortunately, these approaches suffer from poor spatial resolution and require a great number of parameters. The first contribution of this paper addresses these limitations by means of an attention-based estimator named Spatial TransfOrmer for Radio Map estimation (STORM). This scheme not only outperforms the existing estimators, but also exhibits lower computational complexity, translation equivariance, rotation equivariance, and full spatial resolution. The second contribution is an extended transformer architecture that allows STORM to perform active sensing, where the next measurement location is selected based on the previous measurements. This is particularly useful for minimization of drive tests (MDT) in cellular networks, where operators request user equipment to collect measurements. Finally, STORM is extensively validated by experiments with one ray-tracing and two real datasets.
A Test of Time: Predicting the Sustainable Success of Online Collaboration in Wikipedia
Oct 24, 2024The Internet has significantly expanded the potential for global collaboration, allowing millions of users to contribute to collective projects like Wikipedia. While prior work has assessed the success of online collaborations, most approaches are time-agnostic, evaluating success without considering its longevity. Research on the factors that ensure the long-term preservation of high-quality standards in online collaboration is scarce. In this study, we address this gap. We propose a novel metric, `Sustainable Success,' which measures the ability of collaborative efforts to maintain their quality over time. Using Wikipedia as a case study, we introduce the SustainPedia dataset, which compiles data from over 40K Wikipedia articles, including each article's sustainable success label and more than 300 explanatory features such as edit history, user experience, and team composition. Using this dataset, we develop machine learning models to predict the sustainable success of Wikipedia articles. Our best-performing model achieves a high AU-ROC score of 0.88 on average. Our analysis reveals important insights. For example, we find that the longer an article takes to be recognized as high-quality, the more likely it is to maintain that status over time (i.e., be sustainable). Additionally, user experience emerged as the most critical predictor of sustainability. Our analysis provides insights into broader collective actions beyond Wikipedia (e.g., online activism, crowdsourced open-source software), where the same social dynamics that drive success on Wikipedia might play a role. We make all data and code used for this study publicly available for further research.
The Role of Network and Identity in the Diffusion of Hashtags
Jul 17, 2024


Although the spread of behaviors is influenced by many social factors, existing literature tends to study the effects of single factors -- most often, properties of the social network -- on the final cascade. In order to move towards a more integrated view of cascades, this paper offers the first comprehensive investigation into the role of two social factors in the diffusion of 1,337 popular hashtags representing the production of novel culture on Twitter: 1) the topology of the Twitter social network and 2) performance of each user's probable demographic identity. Here, we show that cascades are best modeled using a combination of network and identity, rather than either factor alone. This combined model best reproduces a composite index of ten cascade properties across all 1,337 hashtags. However, there is important heterogeneity in what social factors are required to reproduce different properties of hashtag cascades. For instance, while a combined network+identity model best predicts the popularity of cascades, a network-only model has better performance in predicting cascade growth and an identity-only model in adopter composition. We are able to predict what type of hashtag is best modeled by each combination of features and use this to further improve performance. Additionally, consistent with prior literature on the combined network+identity model most outperforms the single-factor counterfactuals among hashtags used for expressing racial or regional identity, stance-taking, talking about sports, or variants of existing cultural trends with very slow- or fast-growing communicative need. In sum, our results imply the utility of multi-factor models in predicting cascades, in order to account for the varied ways in which network, identity, and other social factors play a role in the diffusion of hashtags on Twitter.
Radio Maps for Beam Alignment in mmWave Communications with Location Uncertainty
Feb 25, 2024



Next generation communication systems require accurate beam alignment to counteract the impairments that characterize propagation in high-frequency bands. The overhead of the pilot sequences required to select the best beam pair is prohibitive when codebooks contain a large number of beams, as is the case in practice. To remedy this issue, some schemes exploit information about the user location to predict the best beam pair. However, these schemes (i) involve no measurements whatsoever, which generally results in a highly suboptimal predicted beam, and (ii) are not robust to localization errors. To address these limitations, this paper builds upon the notion of radio map to develop two algorithms that attain a balance between the quality of the obtained beam pair and measurement overhead. The proposed algorithms predict the received power corresponding to each pair and measure just the Q pairs with highest prediction. While the first algorithm targets simplicity, the second one relies on a Bayesian approach to endow the prediction process with robustness to localization error. The performance of both algorithms is shown to widely outperform existing methods using ray-tracing data.
Spoofing Detection in the Physical Layer with Graph Neural Networks
Jan 16, 2024



In a spoofing attack, a malicious actor impersonates a legitimate user to access or manipulate data without authorization. The vulnerability of cryptographic security mechanisms to compromised user credentials motivates spoofing attack detection in the physical layer, which traditionally relied on channel features, such as the received signal strength (RSS) measured by spatially distributed receivers or access points. However, existing methods cannot effectively cope with the dynamic nature of channels, which change over time as a result of user mobility and other factors. To address this limitation, this work builds upon the intuition that the temporal pattern of changes in RSS features can be used to detect the presence of concurrent transmissions from multiple (possibly changing) locations, which in turn indicates the existence of an attack. Since a localization-based approach would require costly data collection and would suffer from low spatial resolution due to multipath, the proposed algorithm employs a deep neural network to construct a graph embedding of a sequence of RSS features that reflects changes in the propagation conditions. A graph neural network then classifies these embeddings to detect spoofing attacks. The effectiveness and robustness of the proposed scheme are corroborated by experiments with real-data.
Theoretical Analysis of the Radio Map Estimation Problem
Nov 07, 2023



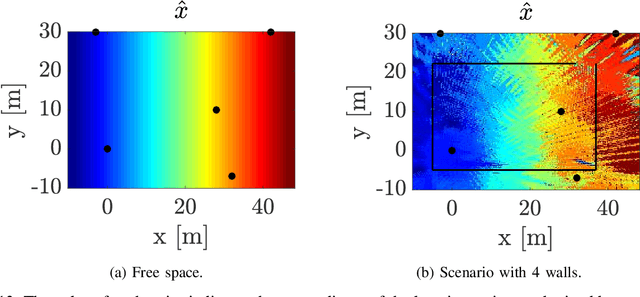
Radio map estimation (RME) constructs representations providing radio frequency metrics, such as the received signal strength, at every location of a geographic area using a set of measurements collected at multiple positions. The resulting radio maps find a wide range of applications in wireless communications, including prediction of coverage holes, network planning, resource allocation, and path planning for mobile robots. Although a vast number of estimators have been proposed, the theoretical understanding of the RME problem has not been pursued. The present work aims at filling this gap along two directions. First, the complexity of the function space of radio maps is quantified by means of lower and upper bounds on their spatial variability, which offers valuable insight into the required spatial distribution of measurements and estimators that can be used. Second, the reconstruction error for power maps in free space is upper bounded for three simple spatial interpolators, namely zeroth-order, first-order, and sinc interpolators. In view of these bounds, the proximity coefficient, which is an increasing function of the transmitted power and a decreasing function of the distance from the transmitters to the mapped region, is proposed to quantify the complexity of the RME problem. Simple numerical experiments assess the tightness of the obtained bounds and reveal the practical trade-offs associated with the considered interpolators.
Spoofing Attack Detection in the Physical Layer with Robustness to User Movement
Oct 17, 2023



In a spoofing attack, an attacker impersonates a legitimate user to access or modify data belonging to the latter. Typical approaches for spoofing detection in the physical layer declare an attack when a change is observed in certain channel features, such as the received signal strength (RSS) measured by spatially distributed receivers. However, since channels change over time, for example due to user movement, such approaches are impractical. To sidestep this limitation, this paper proposes a scheme that combines the decisions of a position-change detector based on a deep neural network to distinguish spoofing from movement. Building upon community detection on graphs, the sequence of received frames is partitioned into subsequences to detect concurrent transmissions from distinct locations. The scheme can be easily deployed in practice since it just involves collecting a small dataset of measurements at a few tens of locations that need not even be computed or recorded. The scheme is evaluated on real data collected for this purpose.
Radio Map Estimation in the Real-World: Empirical Validation and Analysis
Oct 17, 2023



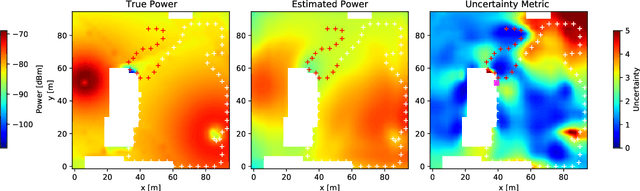
Radio maps quantify received signal strength or other magnitudes of the radio frequency environment at every point of a geographical region. These maps play a vital role in a large number of applications such as wireless network planning, spectrum management, and optimization of communication systems. However, empirical validation of the large number of existing radio map estimators is highly limited. To fill this gap, a large data set of measurements has been collected with an autonomous unmanned aerial vehicle (UAV) and a representative subset of these estimators were evaluated on this data. The performance-complexity trade-off and the impact of fast fading are extensively investigated. Although sophisticated estimators based on deep neural networks (DNNs) exhibit the best performance, they are seen to require large volumes of training data to offer a substantial advantage relative to more traditional schemes. A novel algorithm that blends both kinds of estimators is seen to enjoy the benefits of both, thereby suggesting the potential of exploring this research direction further.
Spoofing Attack Detection in the Physical Layer with Commutative Neural Networks
Nov 08, 2022In a spoofing attack, an attacker impersonates a legitimate user to access or tamper with data intended for or produced by the legitimate user. In wireless communication systems, these attacks may be detected by relying on features of the channel and transmitter radios. In this context, a popular approach is to exploit the dependence of the received signal strength (RSS) at multiple receivers or access points with respect to the spatial location of the transmitter. Existing schemes rely on long-term estimates, which makes it difficult to distinguish spoofing from movement of a legitimate user. This limitation is here addressed by means of a deep neural network that implicitly learns the distribution of pairs of short-term RSS vector estimates. The adopted network architecture imposes the invariance to permutations of the input (commutativity) that the decision problem exhibits. The merits of the proposed algorithm are corroborated on a data set that we collected.
Radio Map Estimation: A Data-Driven Approach to Spectrum Cartography
Feb 01, 2022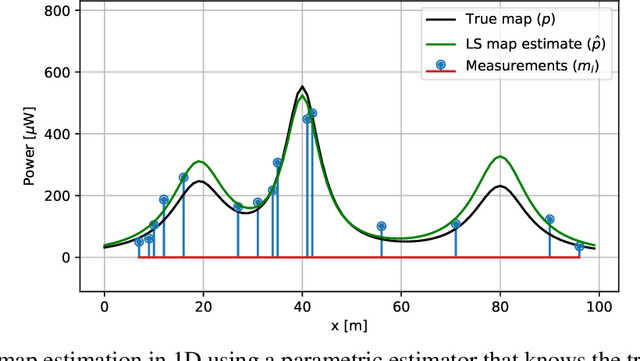
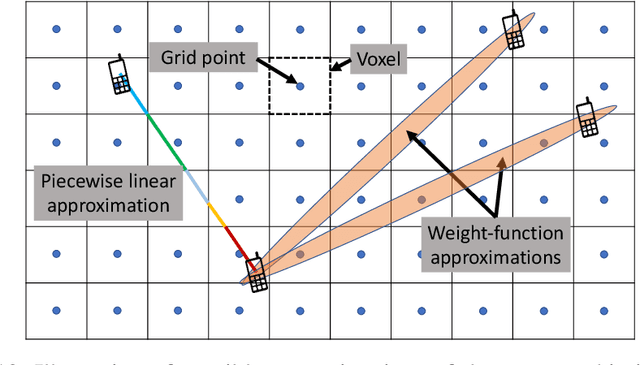
Radio maps can be utilized to characterize a parameter of interest in a communication channel, such as the received signal strength, at every point of a certain geographical region. This article presents an introductory tutorial to radio map estimation, where radio maps are constructed using spatially distributed measurements. After describing the applications of this kind of maps, this article delves into estimation approaches. Starting by simple regression techniques, gradually more sophisticated algorithms are introduced until reaching state-of-the-art estimators. The presentation of this versatile toolkit is accompanied with toy examples to build up intuition and gain insight into the foundations of radio map estimation. As a secondary objective, this article attempts to reconcile the sometimes conflicting terminology in the literature and to connect multiple bodies of literature and sub-communities that have been working separately in this context.