 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounter-example Guided Learning of Bounds on Environment Behavior
Feb 06, 2020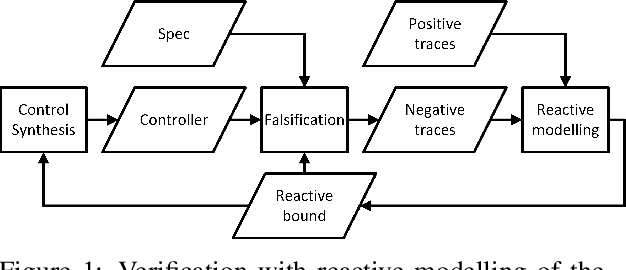
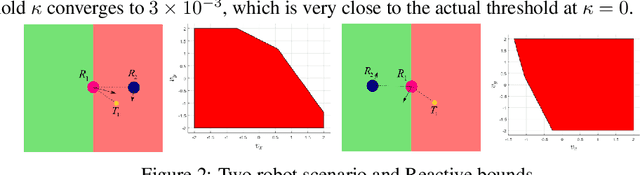
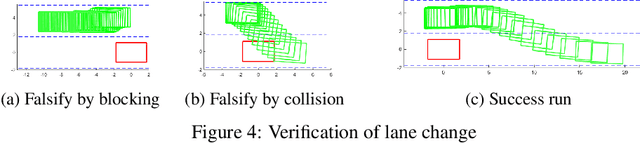
There is a growing interest in building autonomous systems that interact with complex environments. The difficulty associated with obtaining an accurate model for such environments poses a challenge to the task of assessing and guaranteeing the system's performance. We present a data-driven solution that allows for a system to be evaluated for specification conformance without an accurate model of the environment. Our approach involves learning a conservative reactive bound of the environment's behavior using data and specification of the system's desired behavior. First, the approach begins by learning a conservative reactive bound on the environment's actions that captures its possible behaviors with high probability. This bound is then used to assist verification, and if the verification fails under this bound, the algorithm returns counter-examples to show how failure occurs and then uses these to refine the bound. We demonstrate the applicability of the approach through two case-studies: i) verifying controllers for a toy multi-robot system, and ii) verifying an instance of human-robot interaction during a lane-change maneuver given real-world human driving data.
Plug and Play Language Models: A Simple Approach to Controlled Text Generation
Jan 08, 2020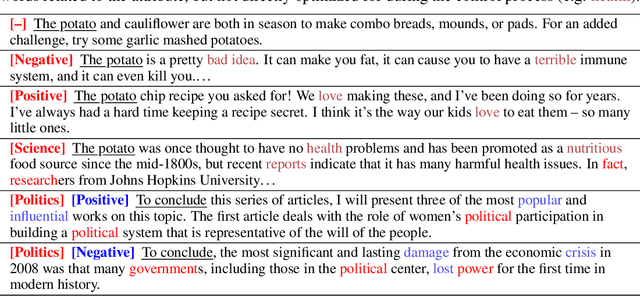
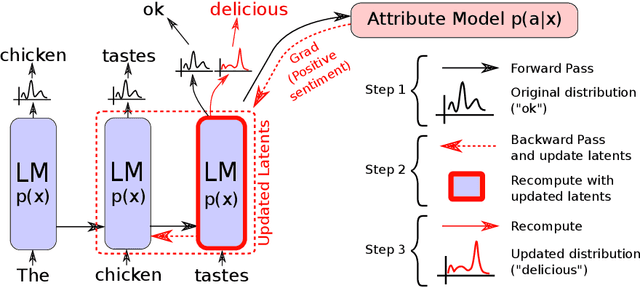
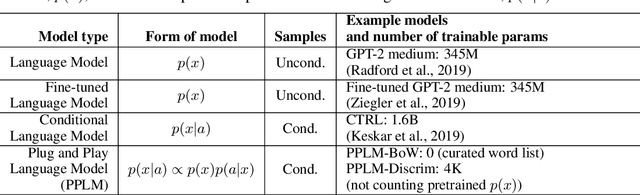
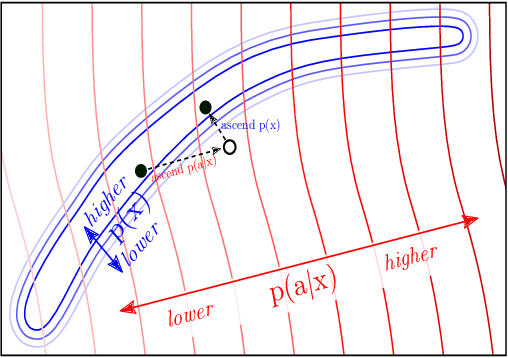
Large transformer-based language models (LMs) trained on huge text corpora have shown unparalleled generation capabilities. However, controlling attributes of the generated language (e.g. switching topic or sentiment) is difficult without modifying the model architecture or fine-tuning on attribute-specific data and entailing the significant cost of retraining. We propose a simple alternative: the Plug and Play Language Model (PPLM) for controllable language generation, which combines a pretrained LM with one or more simple attribute classifiers that guide text generation without any further training of the LM. In the canonical scenario we present, the attribute models are simple classifiers consisting of a user-specified bag of words or a single learned layer with 100,000 times fewer parameters than the LM. Sampling entails a forward and backward pass in which gradients from the attribute model push the LM's hidden activations and thus guide the generation. Model samples demonstrate control over a range of topics and sentiment styles, and extensive automated and human annotated evaluations show attribute alignment and fluency. PPLMs are flexible in that any combination of differentiable attribute models may be used to steer text generation, which will allow for diverse and creative applications beyond the examples given in this paper.
Detecting Adversarial Examples via Neural Fingerprinting
Mar 29, 2018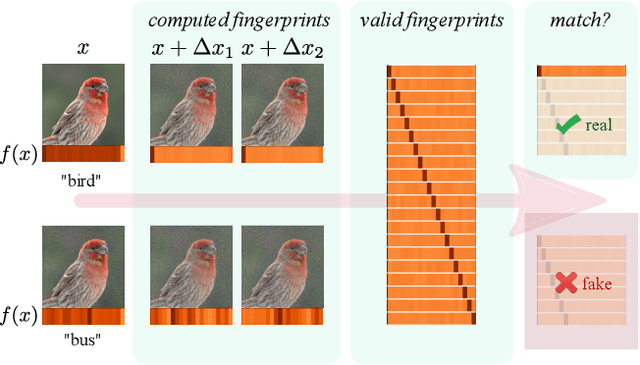
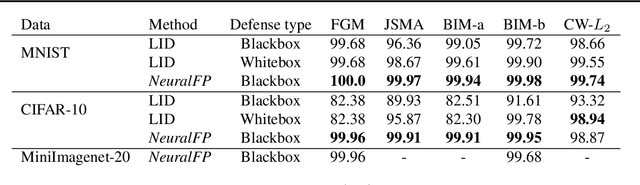
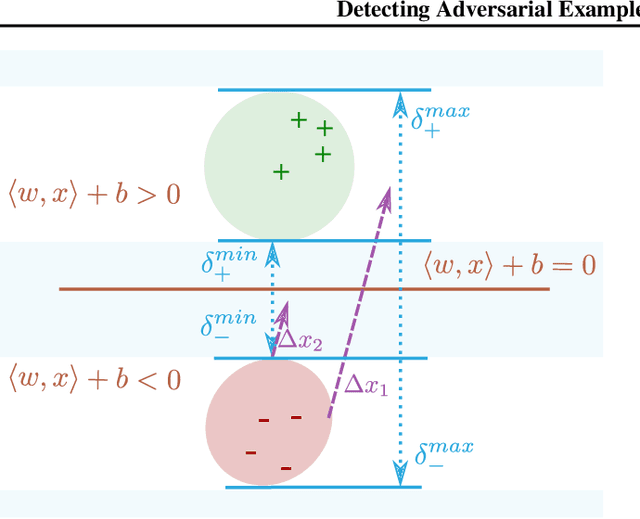
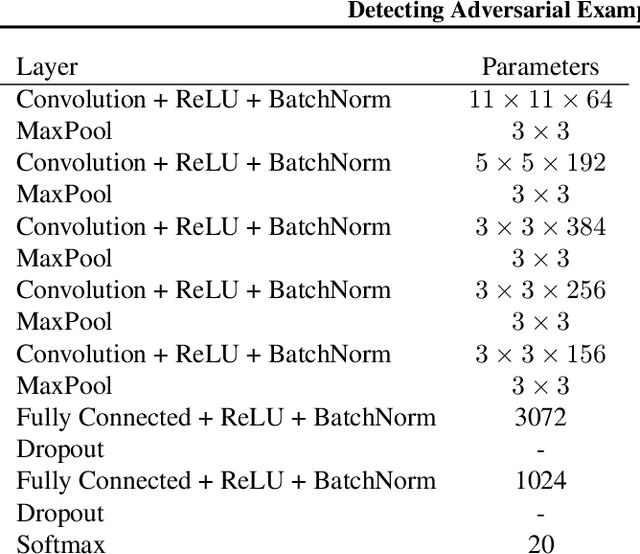
Deep neural networks are vulnerable to adversarial examples, which dramatically alter model output using small input changes. We propose Neural Fingerprinting, a simple, yet effective method to detect adversarial examples by verifying whether model behavior is consistent with a set of secret fingerprints, inspired by the use of biometric and cryptographic signatures. The benefits of our method are that 1) it is fast, 2) it is prohibitively expensive for an attacker to reverse-engineer which fingerprints were used, and 3) it does not assume knowledge of the adversary. In this work, we pose a formal framework to analyze fingerprints under various threat models, and characterize Neural Fingerprinting for linear models. For complex neural networks, we empirically demonstrate that Neural Fingerprinting significantly improves on state-of-the-art detection mechanisms by detecting the strongest known adversarial attacks with 98-100% AUC-ROC scores on the MNIST, CIFAR-10 and MiniImagenet (20 classes) datasets. In particular, the detection accuracy of Neural Fingerprinting generalizes well to unseen test-data under various black- and whitebox threat models, and is robust over a wide range of hyperparameters and choices of fingerprints.