 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Interactions between Automated Vehicles and Cyclists using a coupled In-the-Loop Test Environment
Jul 29, 2025Testing and evaluating automated driving systems (ADS) in interactions with vulnerable road users (VRUs), such as cyclists, are essential for improving the safety of VRUs, but often lack realism. This paper presents and validates a coupled in-the-loop test environment that integrates a Cyclist-in-the Loop test bench with a Vehicle-in-the-Loop test bench via a virtual environment (VE) developed in Unreal Engine 5. The setup enables closed-loop, bidirectional interaction between a real human cyclist and a real automated vehicle under safe and controllable conditions. The automated vehicle reacts to cyclist gestures via stimulated camera input, while the cyclist, riding a stationary bicycle, perceives and reacts to the vehicle in the VE in real time. Validation experiments are conducted using a real automated shuttle bus with a track-and-follow function, performing three test maneuvers - straight-line driving with stop, circular track driving, and double lane change - on a proving ground and in the coupled in-the-loop test environment. The performance is evaluated by comparing the resulting vehicle trajectories in both environments. Additionally, the introduced latencies of individual components in the test setup are measured. The results demonstrate the feasibility of the approach and highlight its strengths and limitations for realistic ADS evaluation.
Situation Awareness for Driver-Centric Driving Style Adaptation
Mar 28, 2024



There is evidence that the driving style of an autonomous vehicle is important to increase the acceptance and trust of the passengers. The driving situation has been found to have a significant influence on human driving behavior. However, current driving style models only partially incorporate driving environment information, limiting the alignment between an agent and the given situation. Therefore, we propose a situation-aware driving style model based on different visual feature encoders pretrained on fleet data, as well as driving behavior predictors, which are adapted to the driving style of a specific driver. Our experiments show that the proposed method outperforms static driving styles significantly and forms plausible situation clusters. Furthermore, we found that feature encoders pretrained on our dataset lead to more precise driving behavior modeling. In contrast, feature encoders pretrained supervised and unsupervised on different data sources lead to more specific situation clusters, which can be utilized to constrain and control the driving style adaptation for specific situations. Moreover, in a real-world setting, where driving style adaptation is happening iteratively, we found the MLP-based behavior predictors achieve good performance initially but suffer from catastrophic forgetting. In contrast, behavior predictors based on situationdependent statistics can learn iteratively from continuous data streams by design. Overall, our experiments show that important information for driving behavior prediction is contained within the visual feature encoder. The dataset is publicly available at huggingface.co/datasets/jHaselberger/SADC-Situation-Awareness-for-Driver-Centric-Driving-Style-Adaptation.
Exploring the Influence of Driving Context on Lateral Driving Style Preferences: A Simulator-Based Study
Feb 27, 2024Technological advancements focus on developing comfortable and acceptable driving characteristics in autonomous vehicles. Present driving functions predominantly possess predefined parameters, and there is no universally accepted driving style for autonomous vehicles. While driving may be technically safe and the likelihood of road accidents is reduced, passengers may still feel insecure due to a mismatch in driving styles between the human and the autonomous system. Incorporating driving style preferences into automated vehicles enhances acceptance, reduces uncertainty, and poses the opportunity to expedite their adoption. Despite the increased research focus on driving styles, there remains a need for comprehensive studies investigating how variations in the driving context impact the assessment of automated driving functions. Therefore, this work evaluates lateral driving style preferences for autonomous vehicles on rural roads, considering different weather and traffic situations. A controlled study was conducted with a variety of German participants utilizing a high-fidelity driving simulator. The subjects experienced four different driving styles, including mimicking of their own driving behavior under two weather conditions. A notable preference for a more passive driving style became evident based on statistical analyses of participants' responses during and after the drives. This study could not confirm the hypothesis that subjects prefer to be driven by mimicking their own driving behavior. Furthermore, the study illustrated that weather conditions and oncoming traffic substantially influence the perceived comfort during autonomous rides. The gathered dataset is openly accessible at https://www.kaggle.com/datasets/jhaselberger/idcld-subject-study-on-driving-style-preferences.
Self-Perception Versus Objective Driving Behavior: Subject Study of Lateral Vehicle Guidance
Feb 21, 2024Advancements in technology are steering attention toward creating comfortable and acceptable driving characteristics in autonomous vehicles. Ensuring a safe and comfortable ride experience is vital for the widespread adoption of autonomous vehicles, as mismatches in driving styles between humans and autonomous systems can impact passenger confidence. Current driving functions have fixed parameters, and there is no universally agreed-upon driving style for autonomous vehicles. Integrating driving style preferences into automated vehicles may enhance acceptance and reduce uncertainty, expediting their adoption. A controlled vehicle study (N = 62) was conducted with a variety of German participants to identify the individual lateral driving behavior of human drivers, specifically emphasizing rural roads. We introduce novel indicators for assessing stationary and transient curve negotiation, directly applicable in developing personalized lateral driving functions. To assess the predictability of these indicators using self-reports, we introduce the MDSI-DE, the German version of the Multidimensional Driving Style Inventory. The correlation analysis between MDSI factor scores and proposed indicators showed modest but significant associations, primarily with acceleration and jerk statistics while the in-depth lateral driving behavior turned out to be highly driver-heterogeneous. The dataset including the anonymized socio-demographics and questionnaire responses, the raw vehicle measurements including labels, and the derived driving behavior indicators are publicly available at https://www.kaggle.com/datasets/jhaselberger/spodb-subject-study-of-lateral-vehicle-guidance.
PanopticNDT: Efficient and Robust Panoptic Mapping
Sep 24, 2023As the application scenarios of mobile robots are getting more complex and challenging, scene understanding becomes increasingly crucial. A mobile robot that is supposed to operate autonomously in indoor environments must have precise knowledge about what objects are present, where they are, what their spatial extent is, and how they can be reached; i.e., information about free space is also crucial. Panoptic mapping is a powerful instrument providing such information. However, building 3D panoptic maps with high spatial resolution is challenging on mobile robots, given their limited computing capabilities. In this paper, we propose PanopticNDT - an efficient and robust panoptic mapping approach based on occupancy normal distribution transform (NDT) mapping. We evaluate our approach on the publicly available datasets Hypersim and ScanNetV2. The results reveal that our approach can represent panoptic information at a higher level of detail than other state-of-the-art approaches while enabling real-time panoptic mapping on mobile robots. Finally, we prove the real-world applicability of PanopticNDT with qualitative results in a domestic application.
Vectorized Scenario Description and Motion Prediction for Scenario-Based Testing
Feb 02, 2023



Automated vehicles (AVs) are tested in diverse scenarios, typically specified by parameters such as velocities, distances, or curve radii. To describe scenarios uniformly independent of such parameters, this paper proposes a vectorized scenario description defined by the road geometry and vehicles' trajectories. Data of this form are generated for three scenarios, merged, and used to train the motion prediction model VectorNet, allowing to predict an AV's trajectory for unseen scenarios. Predicting scenario evaluation metrics, VectorNet partially achieves lower errors than regression models that separately process the three scenarios' data. However, for comprehensive generalization, sufficient variance in the training data must be ensured. Thus, contrary to existing methods, our proposed method can merge diverse scenarios' data and exploit spatial and temporal nuances in the vectorized scenario description. As a result, data from specified test scenarios and real-world scenarios can be compared and combined for (predictive) analyses and scenario selection.
Transfer Importance Sampling $\unicode{x2013}$ How Testing Automated Vehicles in Multiple Test Setups Helps With the Bias-Variance Tradeoff
Apr 15, 2022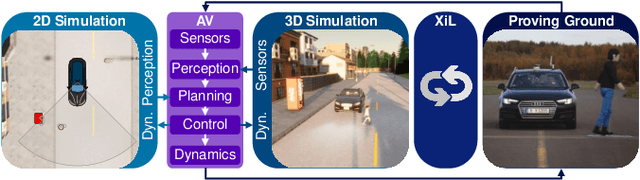
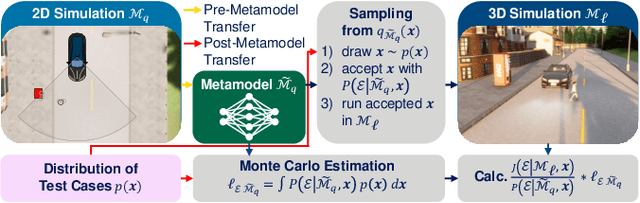
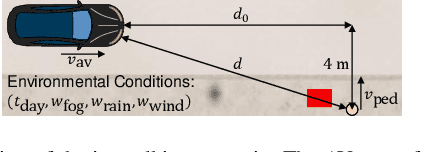
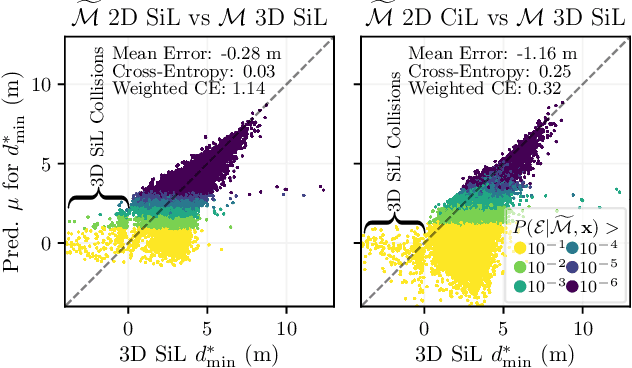
The promise of increased road safety is a key motivator for the development of automated vehicles (AV). Yet, demonstrating that an AV is as safe as, or even safer than, a human-driven vehicle has proven to be challenging. Should an AV be examined purely virtually, allowing large numbers of fully controllable tests? Or should it be tested under real environmental conditions on a proving ground? Since different test setups have different strengths and weaknesses, it is still an open question how virtual and real tests should be combined. On the way to answer this question, this paper proposes transfer importance sampling (TIS), a risk estimation method linking different test setups. Fusing the concepts of transfer learning and importance sampling, TIS uses a scalable, cost-effective test setup to comprehensively explore an AV's behavior. The insights gained then allow parameterizing tests in a more trustworthy test setup accurately reflecting risks. We show that when using a trustworthy test setup alone is prohibitively expensive, linking it to a scalable test setup can increase efficiency $\unicode{x2013}$ without sacrificing the result's validity. Thus, the test setups' individual deficiencies are compensated for by their systematic linkage.
Probabilistic Metamodels for an Efficient Characterization of Complex Driving Scenarios
Oct 07, 2021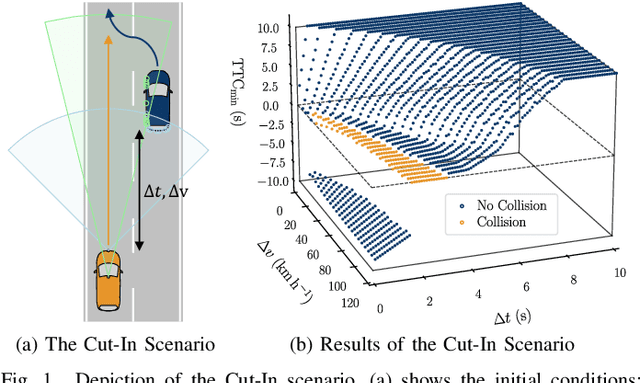
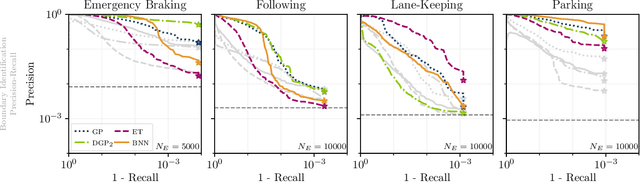
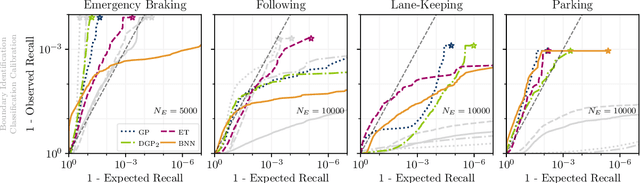
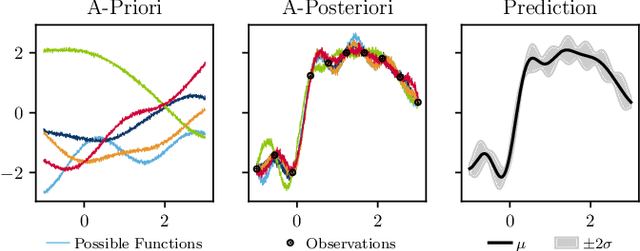
To systematically validate the safe behavior of automated vehicles (AV), the aim of scenario-based testing is to cluster the infinite situations an AV might encounter into a finite set of functional scenarios. Every functional scenario, however, can still manifest itself in a vast amount of variations. Thus, metamodels are often used to perform analyses or to select specific variations for examination. However, despite the safety criticalness of AV testing, metamodels are usually seen as a part of an overall approach, and their predictions are not further examined. In this paper, we analyze the predictive performance of Gaussian processes (GP), deep Gaussian processes, extra-trees (ET), and Bayesian neural networks (BNN), considering four scenarios with 5 to 20 inputs. Building on this, we introduce and evaluate an iterative approach to efficiently select test cases. Our results show that regarding predictive performance, the appropriate selection of test cases is more important than the choice of metamodels. While their great flexibility allows BNNs to benefit from large amounts of data and to model even the most complex scenarios, less flexible models like GPs can convince with higher reliability. This implies that relevant test cases have to be explored using scalable virtual environments and flexible models so that more realistic test environments and more trustworthy models can be used for targeted testing and validation.
Robust Model Predictive Longitudinal Position Tracking Control for an Autonomous Vehicle Based on Multiple Models
Oct 21, 2020
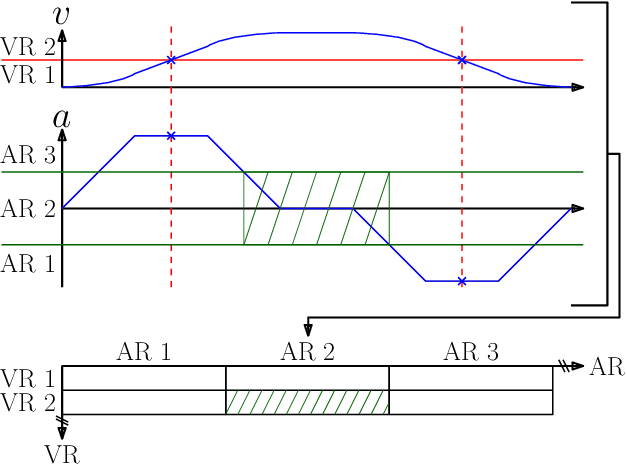
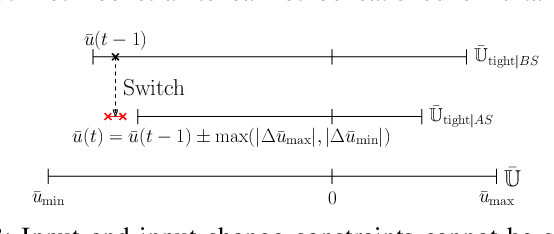
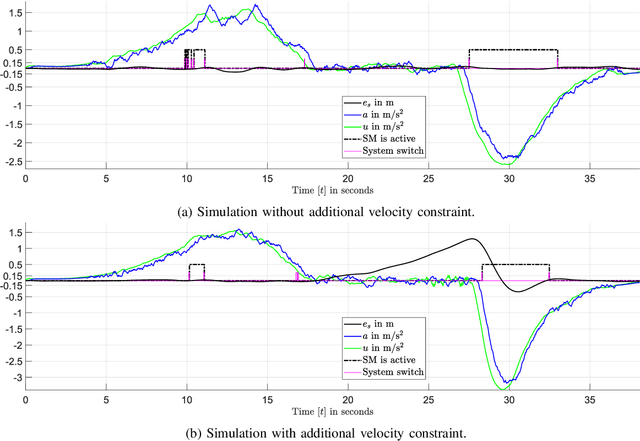
The aim of this work is to control the longitudinal position of an autonomous vehicle with an internal combustion engine. The powertrain has an inherent dead-time characteristic and constraints on physical states apply since the vehicle is neither able to accelerate arbitrarily strong, nor to drive arbitrarily fast. A model predictive controller (MPC) is able to cope with both of the aforementioned system properties. MPC heavily relies on a model and therefore a strategy on how to obtain multiple linear state space prediction models of the nonlinear system via input/output data system identification from acceleration data is given. The models are identified in different regions of the vehicle dynamics in order to obtain more accurate predictions. The still remaining plant-model mismatch can be expressed as an additive disturbance which can be handled through robust control theory. Therefore modifications to the models for applying robust MPC tracking control theory are described. Then a controller which guarantees robust constraint satisfaction and recursive feasibility is designed. As a next step, modifications to apply the controller on multiple models are discussed. In this context, a model switching strategy is provided and theoretical and computational limitations are pointed out. Lastly, simulation results are presented and discussed, including computational load when switching between systems.