 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituation Awareness for Driver-Centric Driving Style Adaptation
Mar 28, 2024



There is evidence that the driving style of an autonomous vehicle is important to increase the acceptance and trust of the passengers. The driving situation has been found to have a significant influence on human driving behavior. However, current driving style models only partially incorporate driving environment information, limiting the alignment between an agent and the given situation. Therefore, we propose a situation-aware driving style model based on different visual feature encoders pretrained on fleet data, as well as driving behavior predictors, which are adapted to the driving style of a specific driver. Our experiments show that the proposed method outperforms static driving styles significantly and forms plausible situation clusters. Furthermore, we found that feature encoders pretrained on our dataset lead to more precise driving behavior modeling. In contrast, feature encoders pretrained supervised and unsupervised on different data sources lead to more specific situation clusters, which can be utilized to constrain and control the driving style adaptation for specific situations. Moreover, in a real-world setting, where driving style adaptation is happening iteratively, we found the MLP-based behavior predictors achieve good performance initially but suffer from catastrophic forgetting. In contrast, behavior predictors based on situationdependent statistics can learn iteratively from continuous data streams by design. Overall, our experiments show that important information for driving behavior prediction is contained within the visual feature encoder. The dataset is publicly available at huggingface.co/datasets/jHaselberger/SADC-Situation-Awareness-for-Driver-Centric-Driving-Style-Adaptation.
Towards Unsupervised Representation Learning: Learning, Evaluating and Transferring Visual Representations
Nov 30, 2023



Unsupervised representation learning aims at finding methods that learn representations from data without annotation-based signals. Abstaining from annotations not only leads to economic benefits but may - and to some extent already does - result in advantages regarding the representation's structure, robustness, and generalizability to different tasks. In the long run, unsupervised methods are expected to surpass their supervised counterparts due to the reduction of human intervention and the inherently more general setup that does not bias the optimization towards an objective originating from specific annotation-based signals. While major advantages of unsupervised representation learning have been recently observed in natural language processing, supervised methods still dominate in vision domains for most tasks. In this dissertation, we contribute to the field of unsupervised (visual) representation learning from three perspectives: (i) Learning representations: We design unsupervised, backpropagation-free Convolutional Self-Organizing Neural Networks (CSNNs) that utilize self-organization- and Hebbian-based learning rules to learn convolutional kernels and masks to achieve deeper backpropagation-free models. (ii) Evaluating representations: We build upon the widely used (non-)linear evaluation protocol to define pretext- and target-objective-independent metrics for measuring and investigating the objective function mismatch between various unsupervised pretext tasks and target tasks. (iii) Transferring representations: We contribute CARLANE, the first 3-way sim-to-real domain adaptation benchmark for 2D lane detection, and a method based on prototypical self-supervised learning. Finally, we contribute a content-consistent unpaired image-to-image translation method that utilizes masks, global and local discriminators, and similarity sampling to mitigate content inconsistencies.
Masked Discriminators for Content-Consistent Unpaired Image-to-Image Translation
Sep 22, 2023A common goal of unpaired image-to-image translation is to preserve content consistency between source images and translated images while mimicking the style of the target domain. Due to biases between the datasets of both domains, many methods suffer from inconsistencies caused by the translation process. Most approaches introduced to mitigate these inconsistencies do not constrain the discriminator, leading to an even more ill-posed training setup. Moreover, none of these approaches is designed for larger crop sizes. In this work, we show that masking the inputs of a global discriminator for both domains with a content-based mask is sufficient to reduce content inconsistencies significantly. However, this strategy leads to artifacts that can be traced back to the masking process. To reduce these artifacts, we introduce a local discriminator that operates on pairs of small crops selected with a similarity sampling strategy. Furthermore, we apply this sampling strategy to sample global input crops from the source and target dataset. In addition, we propose feature-attentive denormalization to selectively incorporate content-based statistics into the generator stream. In our experiments, we show that our method achieves state-of-the-art performance in photorealistic sim-to-real translation and weather translation and also performs well in day-to-night translation. Additionally, we propose the cKVD metric, which builds on the sKVD metric and enables the examination of translation quality at the class or category level.
CARLANE: A Lane Detection Benchmark for Unsupervised Domain Adaptation from Simulation to multiple Real-World Domains
Jun 16, 2022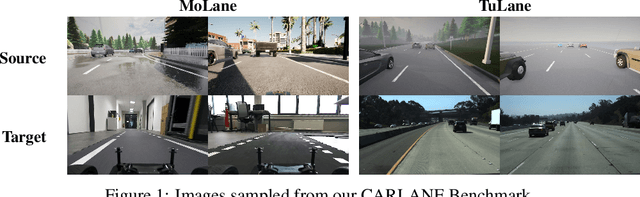
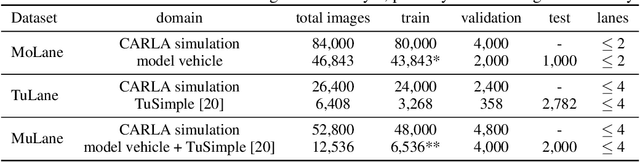

Unsupervised Domain Adaptation demonstrates great potential to mitigate domain shifts by transferring models from labeled source domains to unlabeled target domains. While Unsupervised Domain Adaptation has been applied to a wide variety of complex vision tasks, only few works focus on lane detection for autonomous driving. This can be attributed to the lack of publicly available datasets. To facilitate research in these directions, we propose CARLANE, a 3-way sim-to-real domain adaptation benchmark for 2D lane detection. CARLANE encompasses the single-target datasets MoLane and TuLane and the multi-target dataset MuLane. These datasets are built from three different domains, which cover diverse scenes and contain a total of 163K unique images, 118K of which are annotated. In addition we evaluate and report systematic baselines, including our own method, which builds upon Prototypical Cross-domain Self-supervised Learning. We find that false positive and false negative rates of the evaluated domain adaptation methods are high compared to those of fully supervised baselines. This affirms the need for benchmarks such as CARLANE to further strengthen research in Unsupervised Domain Adaptation for lane detection. CARLANE, all evaluated models and the corresponding implementations are publicly available at https://carlanebenchmark.github.io.
Don't miss the Mismatch: Investigating the Objective Function Mismatch for Unsupervised Representation Learning
Sep 04, 2020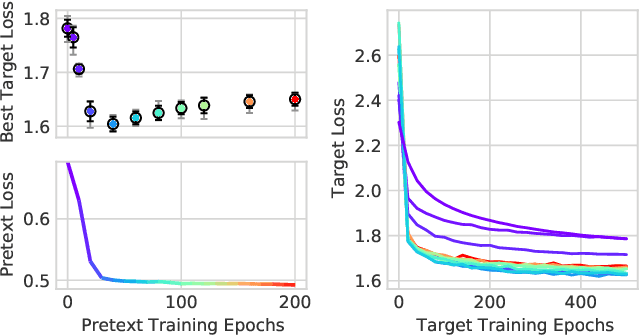
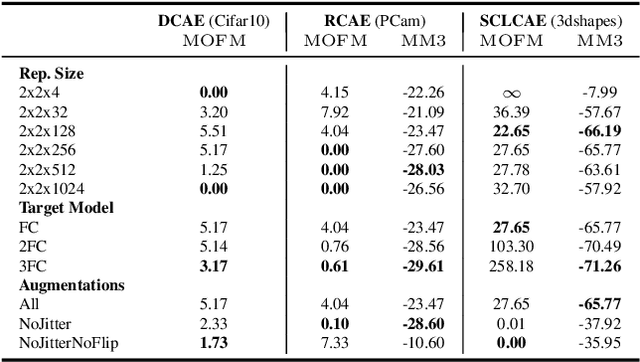
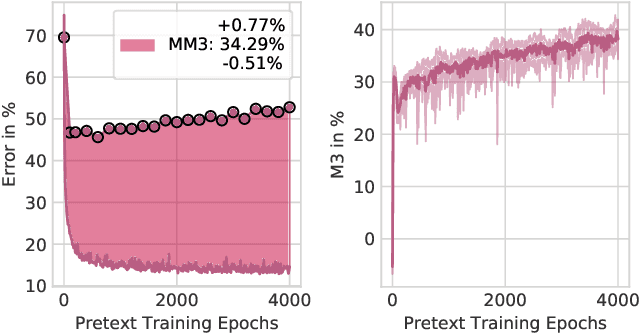
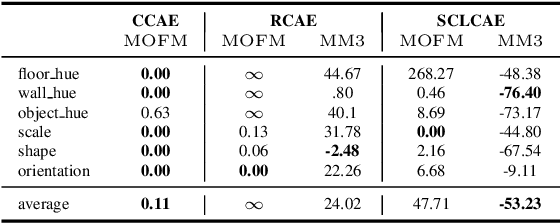
Finding general evaluation metrics for unsupervised representation learning techniques is a challenging open research question, which recently has become more and more necessary due to the increasing interest in unsupervised methods. Even though these methods promise beneficial representation characteristics, most approaches currently suffer from the objective function mismatch. This mismatch states that the performance on a desired target task can decrease when the unsupervised pretext task is learned too long - especially when both tasks are ill-posed. In this work, we build upon the widely used linear evaluation protocol and define new general evaluation metrics to quantitatively capture the objective function mismatch and the more generic metrics mismatch. We discuss the usability and stability of our protocols on a variety of pretext and target tasks and study mismatches in a wide range of experiments. Thereby we disclose dependencies of the objective function mismatch across several pretext and target tasks with respect to the pretext model's representation size, target model complexity, pretext and target augmentations as well as pretext and target task types.
CSNNs: Unsupervised, Backpropagation-free Convolutional Neural Networks for Representation Learning
Jan 29, 2020
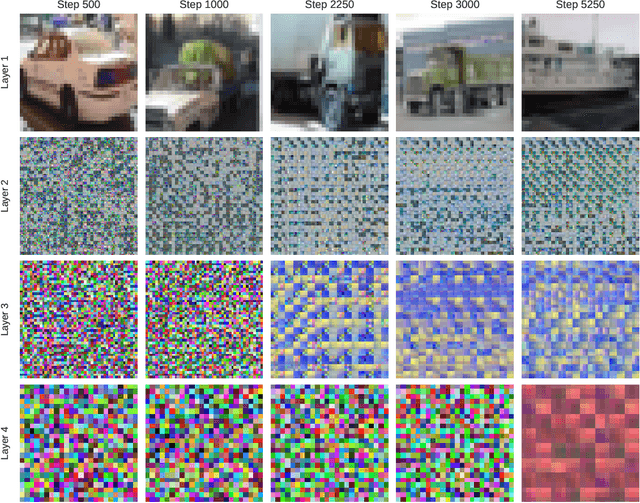
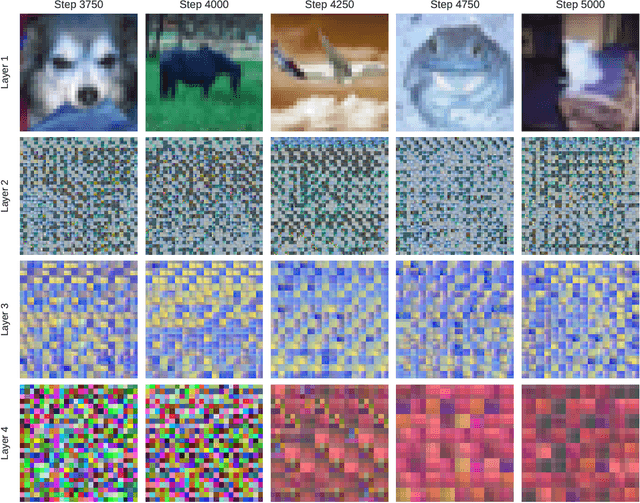
This work combines Convolutional Neural Networks (CNNs), clustering via Self-Organizing Maps (SOMs) and Hebbian Learning to propose the building blocks of Convolutional Self-Organizing Neural Networks (CSNNs), which learn representations in an unsupervised and Backpropagation-free manner. Our approach replaces the learning of traditional convolutional layers from CNNs with the competitive learning procedure of SOMs and simultaneously learns local masks between those layers with separate Hebbian-like learning rules to overcome the problem of disentangling factors of variation when filters are learned through clustering. We investigate the learned representation by designing two simple models with our building blocks, achieving comparable performance to many methods which use Backpropagation, while we reach comparable performance on Cifar10 and give baseline performances on Cifar100, Tiny ImageNet and a small subset of ImageNet for Backpropagation-free methods.