 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituation Awareness for Driver-Centric Driving Style Adaptation
Mar 28, 2024



There is evidence that the driving style of an autonomous vehicle is important to increase the acceptance and trust of the passengers. The driving situation has been found to have a significant influence on human driving behavior. However, current driving style models only partially incorporate driving environment information, limiting the alignment between an agent and the given situation. Therefore, we propose a situation-aware driving style model based on different visual feature encoders pretrained on fleet data, as well as driving behavior predictors, which are adapted to the driving style of a specific driver. Our experiments show that the proposed method outperforms static driving styles significantly and forms plausible situation clusters. Furthermore, we found that feature encoders pretrained on our dataset lead to more precise driving behavior modeling. In contrast, feature encoders pretrained supervised and unsupervised on different data sources lead to more specific situation clusters, which can be utilized to constrain and control the driving style adaptation for specific situations. Moreover, in a real-world setting, where driving style adaptation is happening iteratively, we found the MLP-based behavior predictors achieve good performance initially but suffer from catastrophic forgetting. In contrast, behavior predictors based on situationdependent statistics can learn iteratively from continuous data streams by design. Overall, our experiments show that important information for driving behavior prediction is contained within the visual feature encoder. The dataset is publicly available at huggingface.co/datasets/jHaselberger/SADC-Situation-Awareness-for-Driver-Centric-Driving-Style-Adaptation.
Exploring the Influence of Driving Context on Lateral Driving Style Preferences: A Simulator-Based Study
Feb 27, 2024Technological advancements focus on developing comfortable and acceptable driving characteristics in autonomous vehicles. Present driving functions predominantly possess predefined parameters, and there is no universally accepted driving style for autonomous vehicles. While driving may be technically safe and the likelihood of road accidents is reduced, passengers may still feel insecure due to a mismatch in driving styles between the human and the autonomous system. Incorporating driving style preferences into automated vehicles enhances acceptance, reduces uncertainty, and poses the opportunity to expedite their adoption. Despite the increased research focus on driving styles, there remains a need for comprehensive studies investigating how variations in the driving context impact the assessment of automated driving functions. Therefore, this work evaluates lateral driving style preferences for autonomous vehicles on rural roads, considering different weather and traffic situations. A controlled study was conducted with a variety of German participants utilizing a high-fidelity driving simulator. The subjects experienced four different driving styles, including mimicking of their own driving behavior under two weather conditions. A notable preference for a more passive driving style became evident based on statistical analyses of participants' responses during and after the drives. This study could not confirm the hypothesis that subjects prefer to be driven by mimicking their own driving behavior. Furthermore, the study illustrated that weather conditions and oncoming traffic substantially influence the perceived comfort during autonomous rides. The gathered dataset is openly accessible at https://www.kaggle.com/datasets/jhaselberger/idcld-subject-study-on-driving-style-preferences.
Self-Perception Versus Objective Driving Behavior: Subject Study of Lateral Vehicle Guidance
Feb 21, 2024Advancements in technology are steering attention toward creating comfortable and acceptable driving characteristics in autonomous vehicles. Ensuring a safe and comfortable ride experience is vital for the widespread adoption of autonomous vehicles, as mismatches in driving styles between humans and autonomous systems can impact passenger confidence. Current driving functions have fixed parameters, and there is no universally agreed-upon driving style for autonomous vehicles. Integrating driving style preferences into automated vehicles may enhance acceptance and reduce uncertainty, expediting their adoption. A controlled vehicle study (N = 62) was conducted with a variety of German participants to identify the individual lateral driving behavior of human drivers, specifically emphasizing rural roads. We introduce novel indicators for assessing stationary and transient curve negotiation, directly applicable in developing personalized lateral driving functions. To assess the predictability of these indicators using self-reports, we introduce the MDSI-DE, the German version of the Multidimensional Driving Style Inventory. The correlation analysis between MDSI factor scores and proposed indicators showed modest but significant associations, primarily with acceleration and jerk statistics while the in-depth lateral driving behavior turned out to be highly driver-heterogeneous. The dataset including the anonymized socio-demographics and questionnaire responses, the raw vehicle measurements including labels, and the derived driving behavior indicators are publicly available at https://www.kaggle.com/datasets/jhaselberger/spodb-subject-study-of-lateral-vehicle-guidance.
CARLANE: A Lane Detection Benchmark for Unsupervised Domain Adaptation from Simulation to multiple Real-World Domains
Jun 16, 2022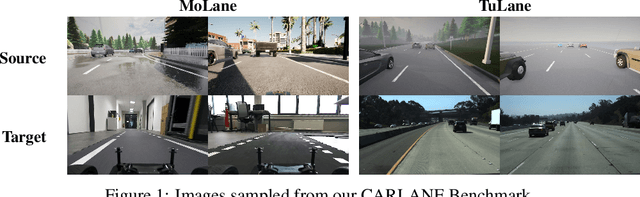
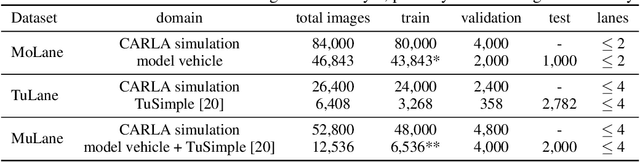
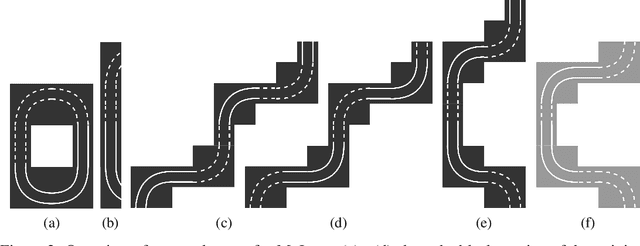

Unsupervised Domain Adaptation demonstrates great potential to mitigate domain shifts by transferring models from labeled source domains to unlabeled target domains. While Unsupervised Domain Adaptation has been applied to a wide variety of complex vision tasks, only few works focus on lane detection for autonomous driving. This can be attributed to the lack of publicly available datasets. To facilitate research in these directions, we propose CARLANE, a 3-way sim-to-real domain adaptation benchmark for 2D lane detection. CARLANE encompasses the single-target datasets MoLane and TuLane and the multi-target dataset MuLane. These datasets are built from three different domains, which cover diverse scenes and contain a total of 163K unique images, 118K of which are annotated. In addition we evaluate and report systematic baselines, including our own method, which builds upon Prototypical Cross-domain Self-supervised Learning. We find that false positive and false negative rates of the evaluated domain adaptation methods are high compared to those of fully supervised baselines. This affirms the need for benchmarks such as CARLANE to further strengthen research in Unsupervised Domain Adaptation for lane detection. CARLANE, all evaluated models and the corresponding implementations are publicly available at https://carlanebenchmark.github.io.