 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real Transfer and Robustness Evaluation of Reinforcement Learning Control with Integrated Perception on an ASV for Floating Waste Capture
May 04, 2026Autonomous surface vessels for floating-waste removal operate under varying hydrodynamics, external disturbances, and challenging water-surface perception. We present a field-validated system that combines camera-based polarimetric perception with a lightweight DRL-based controller for floating-waste detection and capture. Camera detections are converted into water-surface target points and tracked by a controller trained entirely in simulation and deployed directly on a retrofitted ASV platform. Our main contribution is a sim-to-real testing methodology that combines a two-stage simulation protocol with a perception abstraction module designed to mimic real camera behavior, enabling reproducible field trials and explicit evaluation of the sim-to-real gap. We apply this framework in matched simulation and field experiments across 14 disturbance regimes to expose failure modes and evaluate robustness. The results show centimeter-level terminal accuracy and indicate robust control performance under the evaluated perturbation regimes. The main source of degradation is insufficient actuation-model fidelity. We also demonstrate the system in a search-and-capture application using real camera detections in real-world conditions over areas of up to $450~m^2$. The study distills practical lessons for reliable transfer, including improved actuation-model fidelity, targeted domain randomization, and careful management of latency and timestamps across modules, while highlighting remaining challenges.
Evaluating Robustness of Deep Reinforcement Learning for Autonomous Surface Vehicle Control in Field Tests
May 15, 2025Despite significant advancements in Deep Reinforcement Learning (DRL) for Autonomous Surface Vehicles (ASVs), their robustness in real-world conditions, particularly under external disturbances, remains insufficiently explored. In this paper, we evaluate the resilience of a DRL-based agent designed to capture floating waste under various perturbations. We train the agent using domain randomization and evaluate its performance in real-world field tests, assessing its ability to handle unexpected disturbances such as asymmetric drag and an off-center payload. We assess the agent's performance under these perturbations in both simulation and real-world experiments, quantifying performance degradation and benchmarking it against an MPC baseline. Results indicate that the DRL agent performs reliably despite significant disturbances. Along with the open-source release of our implementation, we provide insights into effective training strategies, real-world challenges, and practical considerations for deploying DRLbased ASV controllers.
Building an Aerial-Ground Robotics System for Precision Farming
Nov 08, 2019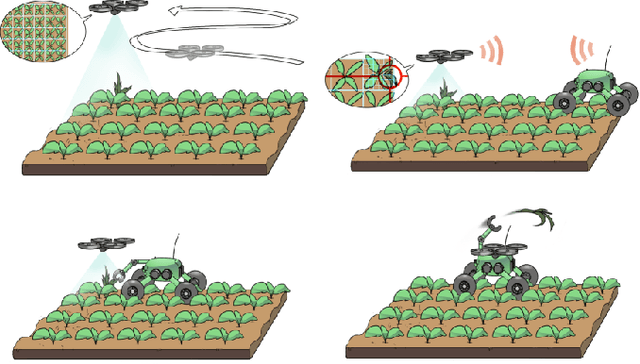
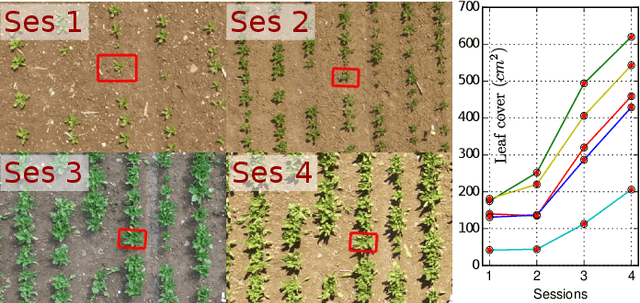
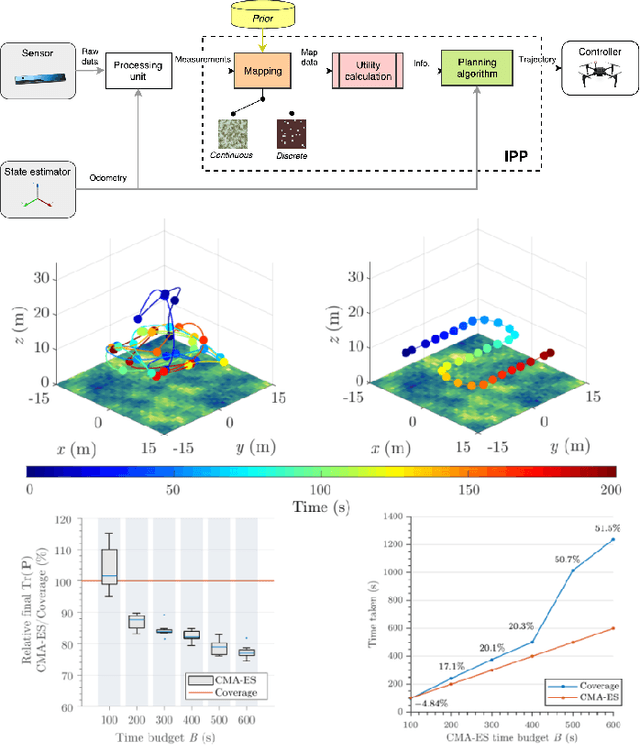
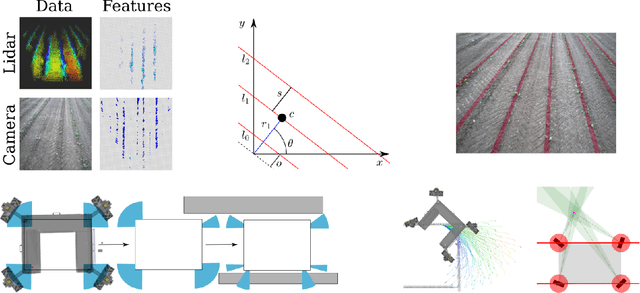
The application of autonomous robots in agriculture is gaining more and more popularity thanks to the high impact it may have on food security, sustainability, resource use efficiency, reduction of chemical treatments, minimization of the human effort and maximization of yield. The Flourish research project faced this challenge by developing an adaptable robotic solution for precision farming that combines the aerial survey capabilities of small autonomous unmanned aerial vehicles (UAVs) with flexible targeted intervention performed by multi-purpose agricultural unmanned ground vehicles (UGVs). This paper presents an exhaustive overview of the scientific and technological advances and outcomes obtained in the Flourish project. We introduce multi-spectral perception algorithms and aerial and ground based systems developed to monitor crop density, weed pressure, crop nitrogen nutrition status, and to accurately classify and locate weeds. We then introduce the navigation and mapping systems to deal with the specificity of the employed robots and of the agricultural environment, highlighting the collaborative modules that enable the UAVs and UGVs to collect and share information in a unified environment model. We finally present the ground intervention hardware, software solutions, and interfaces we implemented and tested in different field conditions and with different crops. We describe here a real use case in which a UAV collaborates with a UGV to monitor the field and to perform selective spraying treatments in a totally autonomous way.